
A robot is constituted of four main components: Motors for motion, Mechanics to hold the pieces together, sensors to make it react to environment and a code to control them and create the desired functionality.
Sensors plays an important role when dealing with autonomous robot. We’ll see here how to use them.
Presentation
The purpose of a sensor is to measure a physical value (velocity, angle, temperature, etc.). There are numerous sensors of different types passive and active (require powering). In this example, we use a photoresistor but it can be applied to other type of sensor.
Here is a list of sensor :
Passif:
- photoresistor
- tilt
- push button
Actif:
- infrared distance sensor
- ultrasonic distance sensor
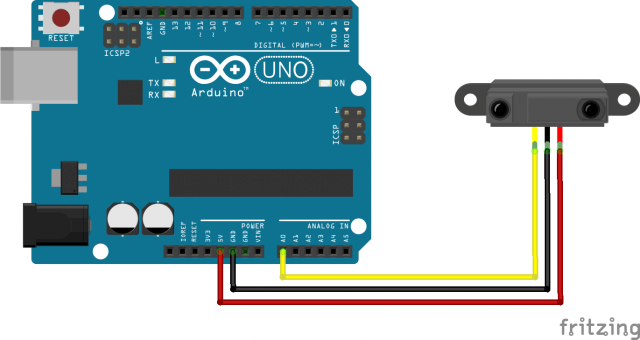
Wiring
Sensor have different wiring depending on the number of pin they use. They ususally have 3 pins ground, voltage supply 5V and the signal. For passive sensor, a third output as to be created to read the voltage at its ends.



Base code to read sensor
Depending on its type, sensor can return two informations: a state (presence or not) or a continous voltage value.
To read a state, the function to use is digitalRead(). It returns a level HIGH or LOW which represent the voltage applied on the digital pin (0, 1 , 2, etc.).
/*Read digital state*/ // Constants #define DELAY 500 // Delay between two measurements in ms // Parameters const int sensorPin = 2; // Pin connected to sensor //Variables int sensorState; // state from the sensor void setup(void) { Serial.begin(9600); pinMode(sensorPin,INPUT); } void loop(void) { sensorState = digitalRead(sensorPin); if (sensorState == HIGH) { Serial.print("Sensor state is HIGH "); } else { Serial.print("Sensor state is LOW "); } delay(DELAY); }
To read a continuous value, the function we use is analogRead() . It returns a value between 0 and 1023 representing the voltage applied on the Arduino analog pin (A0, A1, A2, etc.).
/*Read analog signal*/ // Constants #define DELAY 500 // Delay between two measurements in ms // Parameters const int sensorPin = A0; // Pin connected to sensor //Variables int sensorVal; // Analog value from the sensor void setup(void) { Serial.begin(9600); } void loop(void) { sensorVal = analogRead(sensorPin); Serial.print("Sensor reading = "); Serial.println(sensorVal); // the analog reading delay(DELAY); }
Use cases
- Measure temperature and humidity with sensor DHT11
- Measure temperature with sensor LM35
- Distance measurement with sensor HC-SR04
- Luminosity measurement with a photoresistor
Find other examples and tutorials in our Automatic code generator
Code Architect