
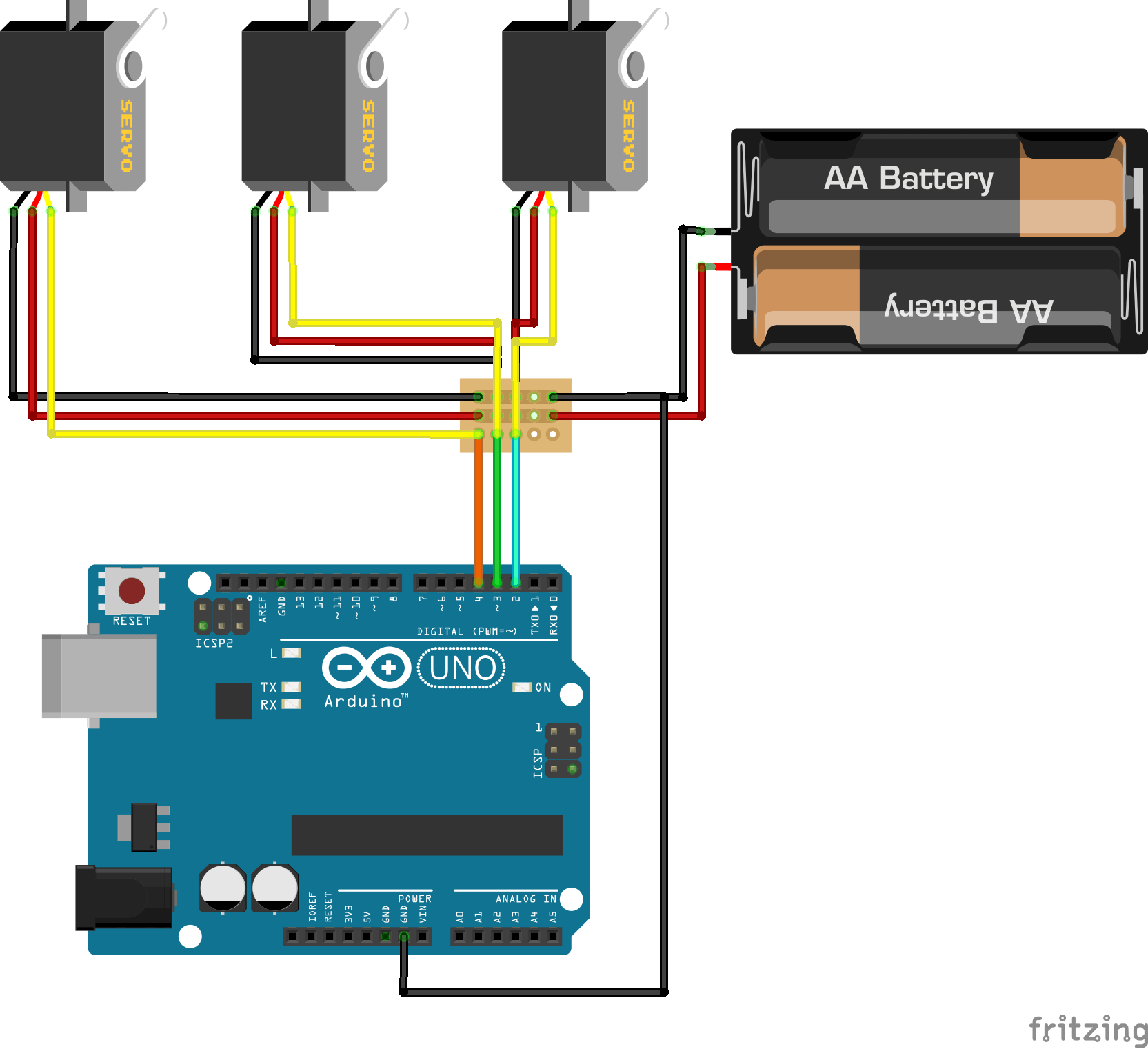
L’objectif de ce tutoriel est de fabriquer une carte de contrôle pour servomoteur (servo shield), permettant de distribuer les signaux PWM d’une carte Arduino(ou autre) ainsi que la puissance de l’alimentation aux servomoteurs.
Matériel
- pince plate
- cutter
- fer à souder
- barrette de pin de connexion
- fils de connexion
- connecteur mâle pour la batterie
Électronique
Pour piloter un ensemble de servomoteurs avec la carte Arduino, un circuit imprimé doit être utilisé. Pour cela, différentes méthodes peuvent être utilisées comme avec un « servo shield » type Maestro(Pololu) mais vous pouvez fabriquer votre driver vous-même.
1. Prenez une carte de prototypage perforée (experimental board)

Sur la référence de carte utilisée dans ce tutoriel, toutes les entrées sur une même ligne sont reliées par une piste de cuivre.
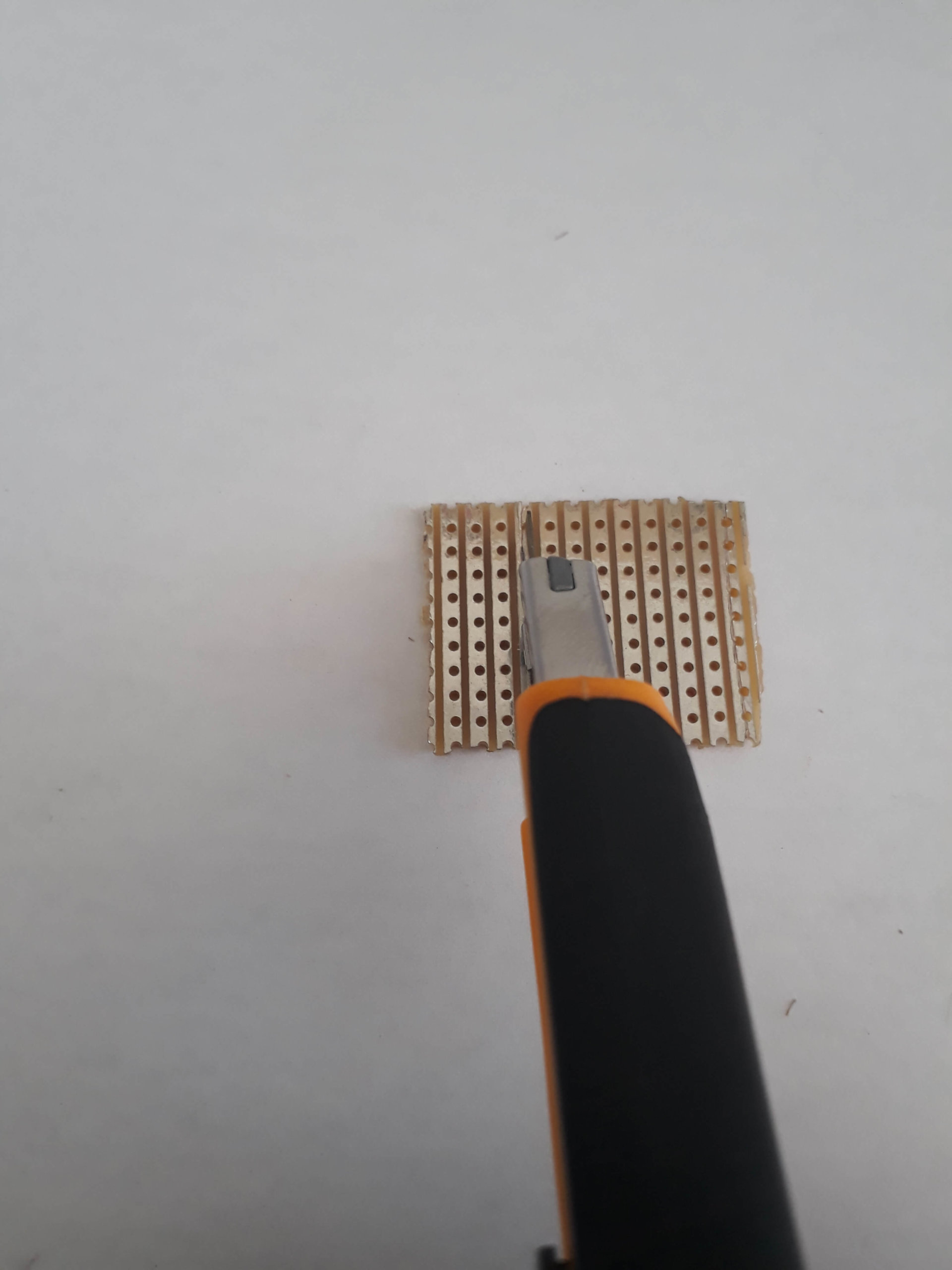
Pour commencer, découpez la carte pour avoir le nombre de trous désirés(typiquement 3x le nombre de servomoteurs +2 rangées en plus pour la batterie). A l’aide du cutter, passez plusieurs fois sur une ligne de trous des deux côtés de la carte. Ceci permet de fragiliser le plastique et de le casser plus précisément.




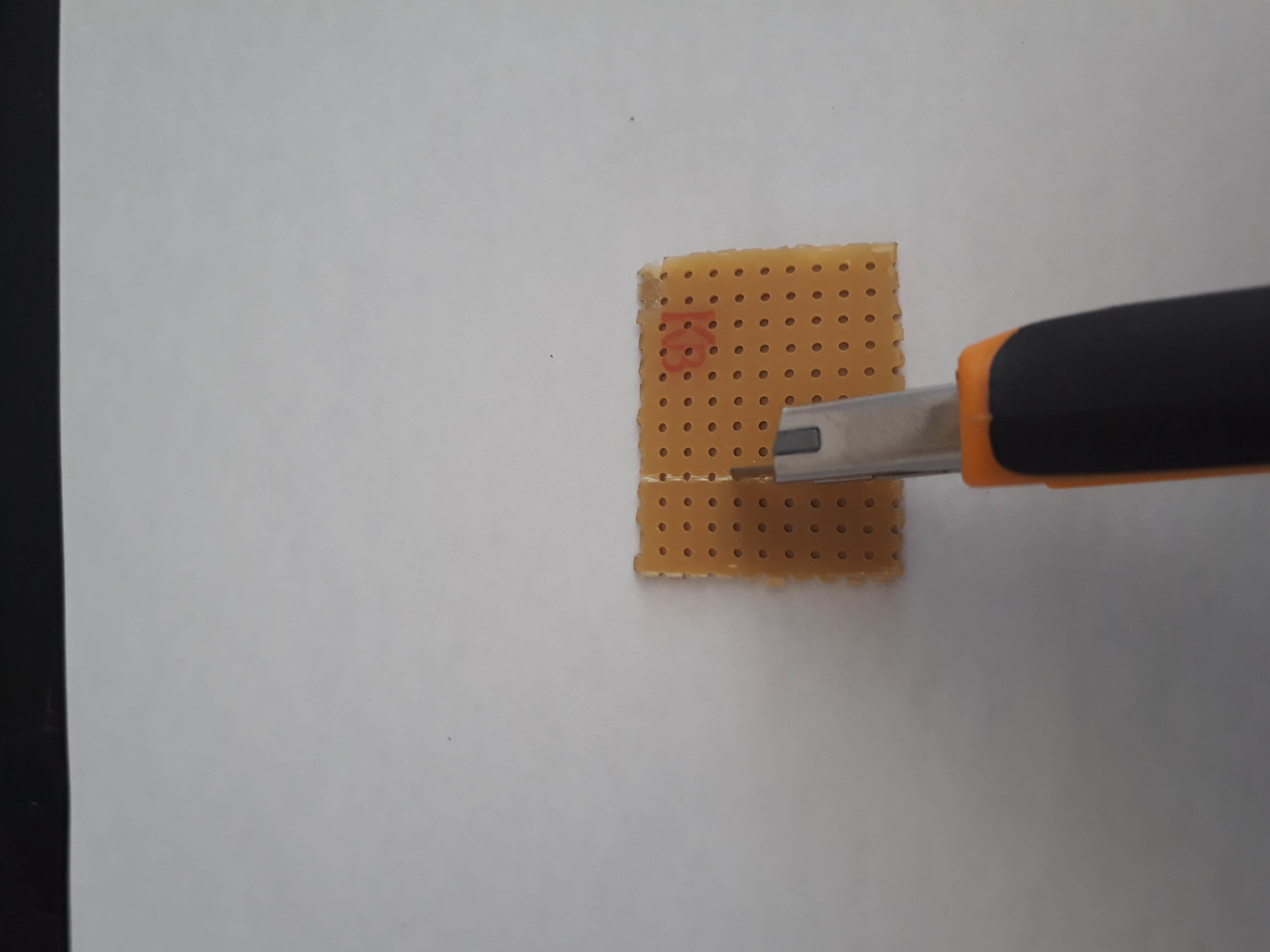
Utilisez ensuite la pince pour séparer les deux parties en suivant la ligne que vous avez dessinée avec le cutter.

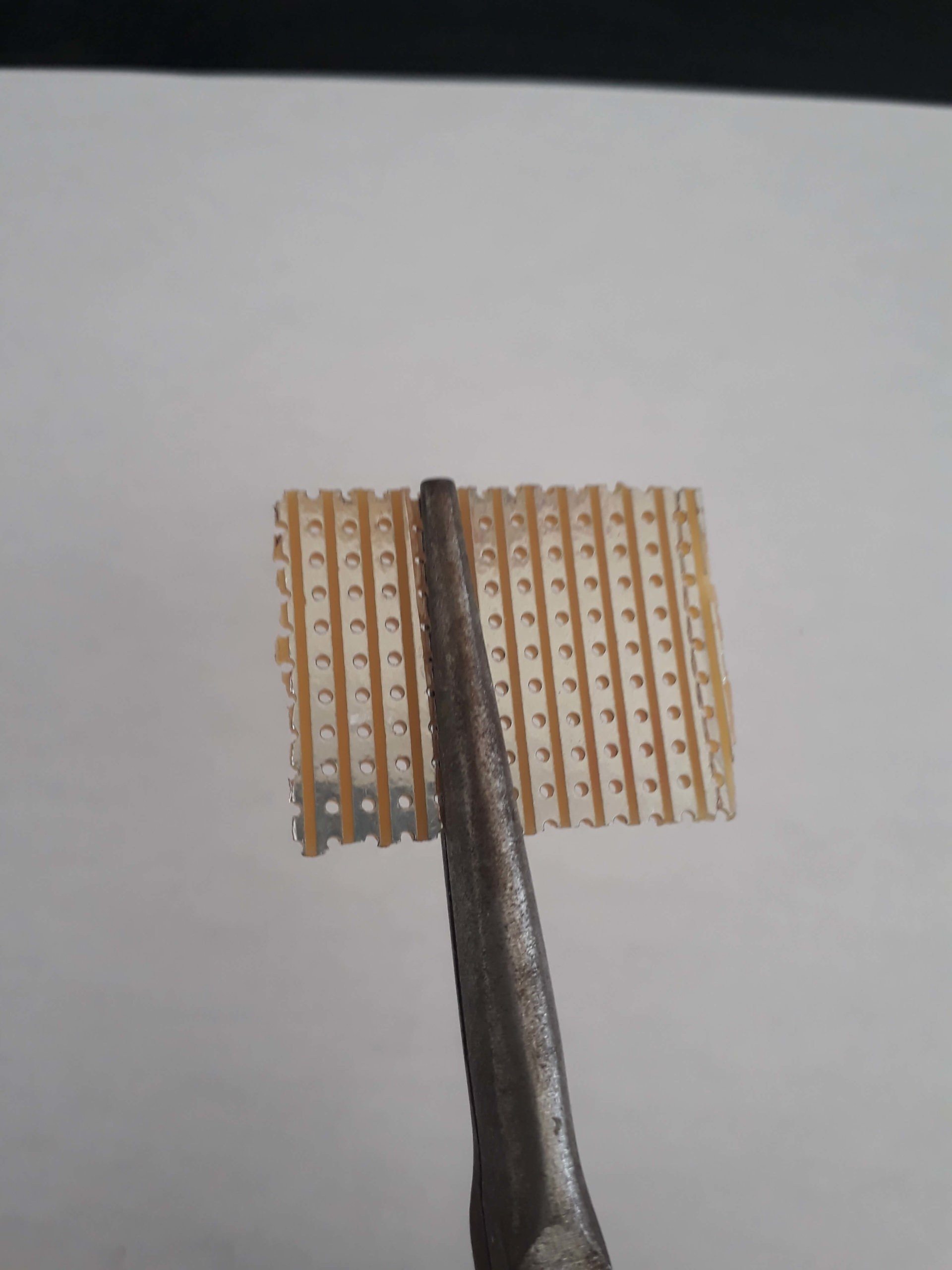
Une fois la carte découpée, vous pouvez retirer le cuivre restant sur les bords soit avec le cutter soit avec une lime.
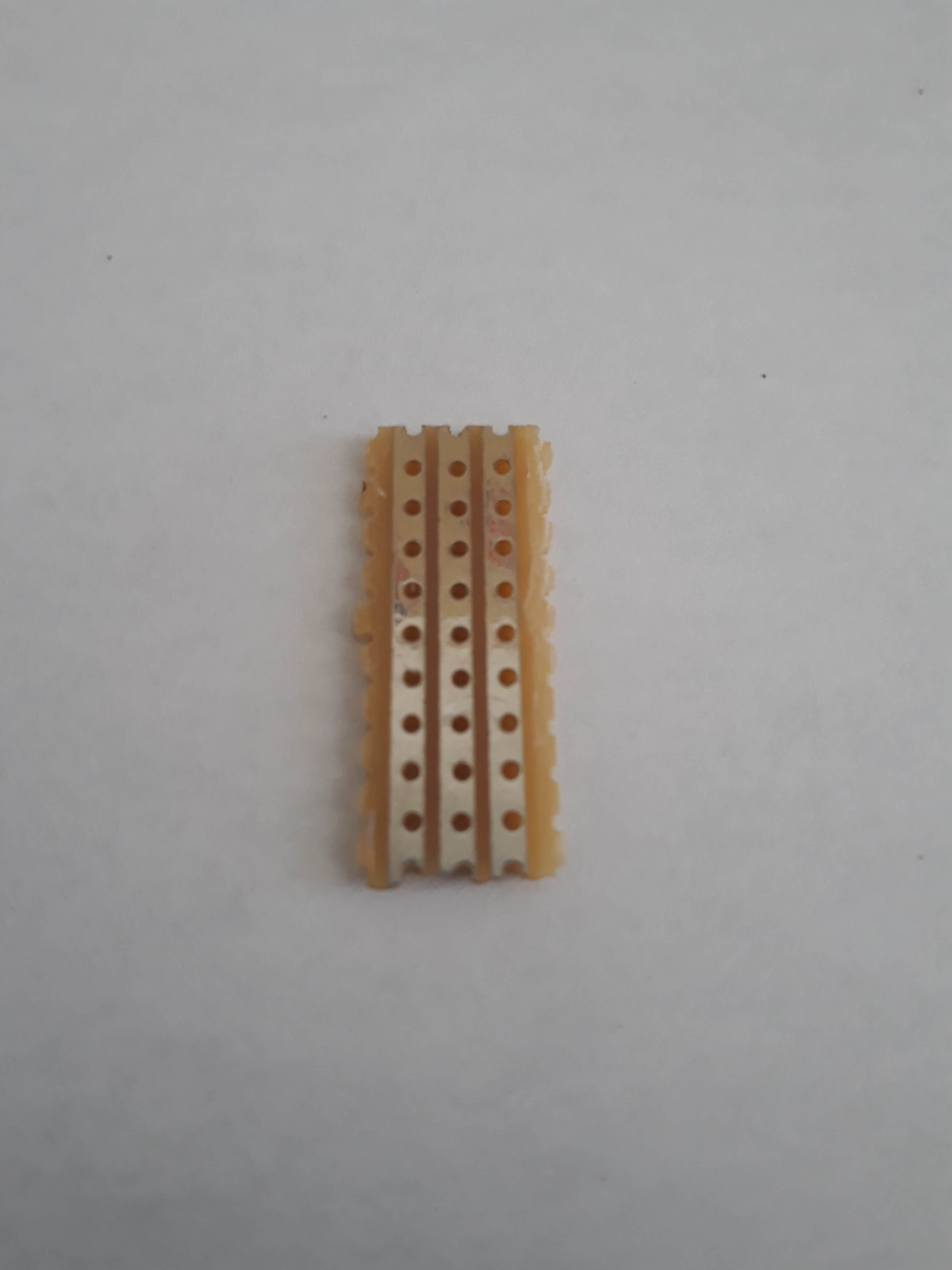
A l’aide du cutter, séparez les entrées sur la ligne où sont branchées les entrées PWM afin d’assurer l’isolation électrique entre les voies.

Afin de valider votre travail, vous pouvez vérifier l’isolation à l’aide d’un multimètre.


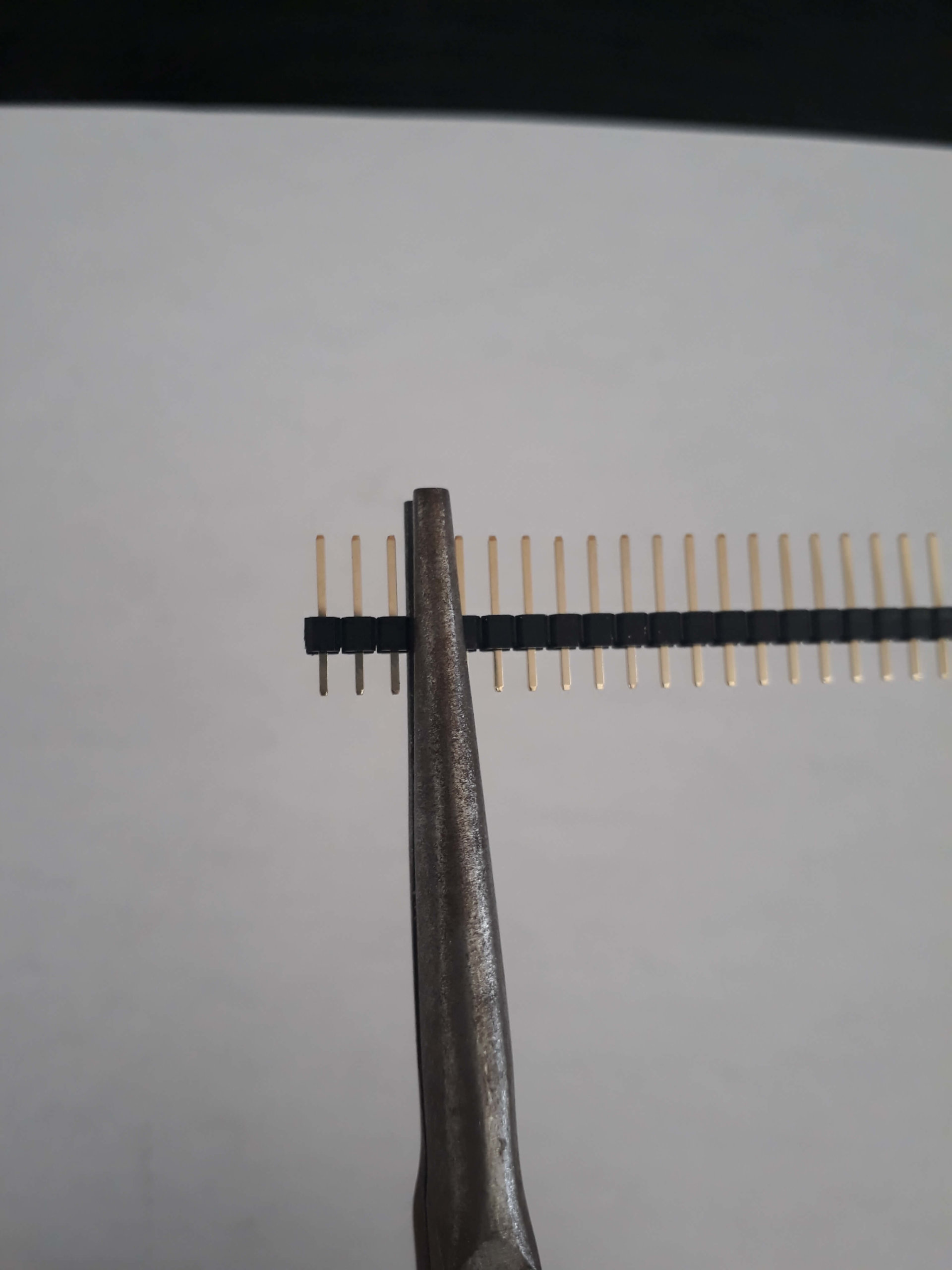
2. prenez une barrette de connecteur (break away header)


Séparez les connecteurs par groupe de trois, à l’aide d’une pince, pour autant de servomoteurs ou de capteurs que vous souhaitez brancher.
Souder les pattes à la carte de prototypage en faisant dépasser le plus petit côté des pins du côté des pistes de cuivre.
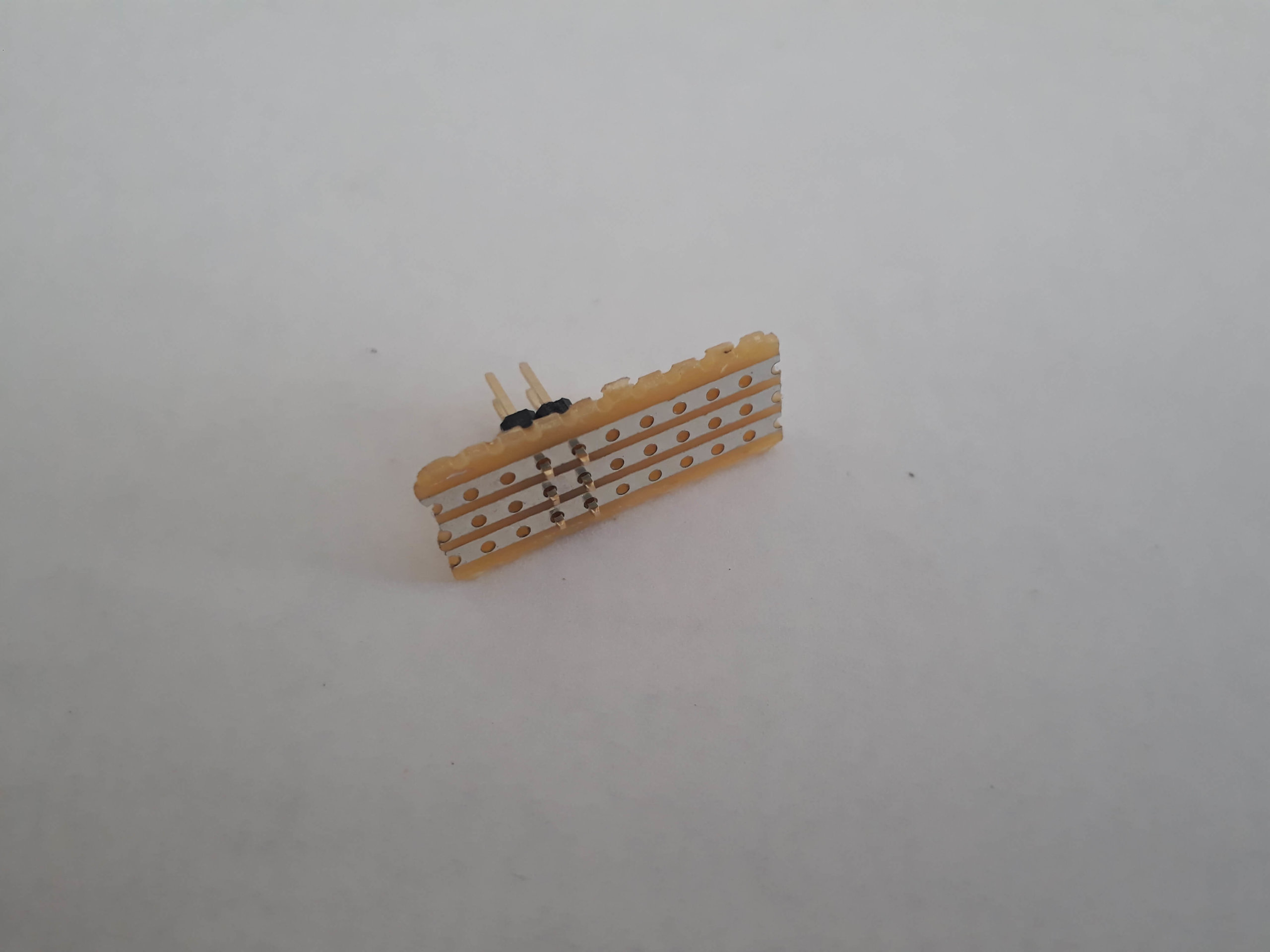


Une fois les soudures faites, vérifiez que les différentes pistes sont bien isolées entre elles.
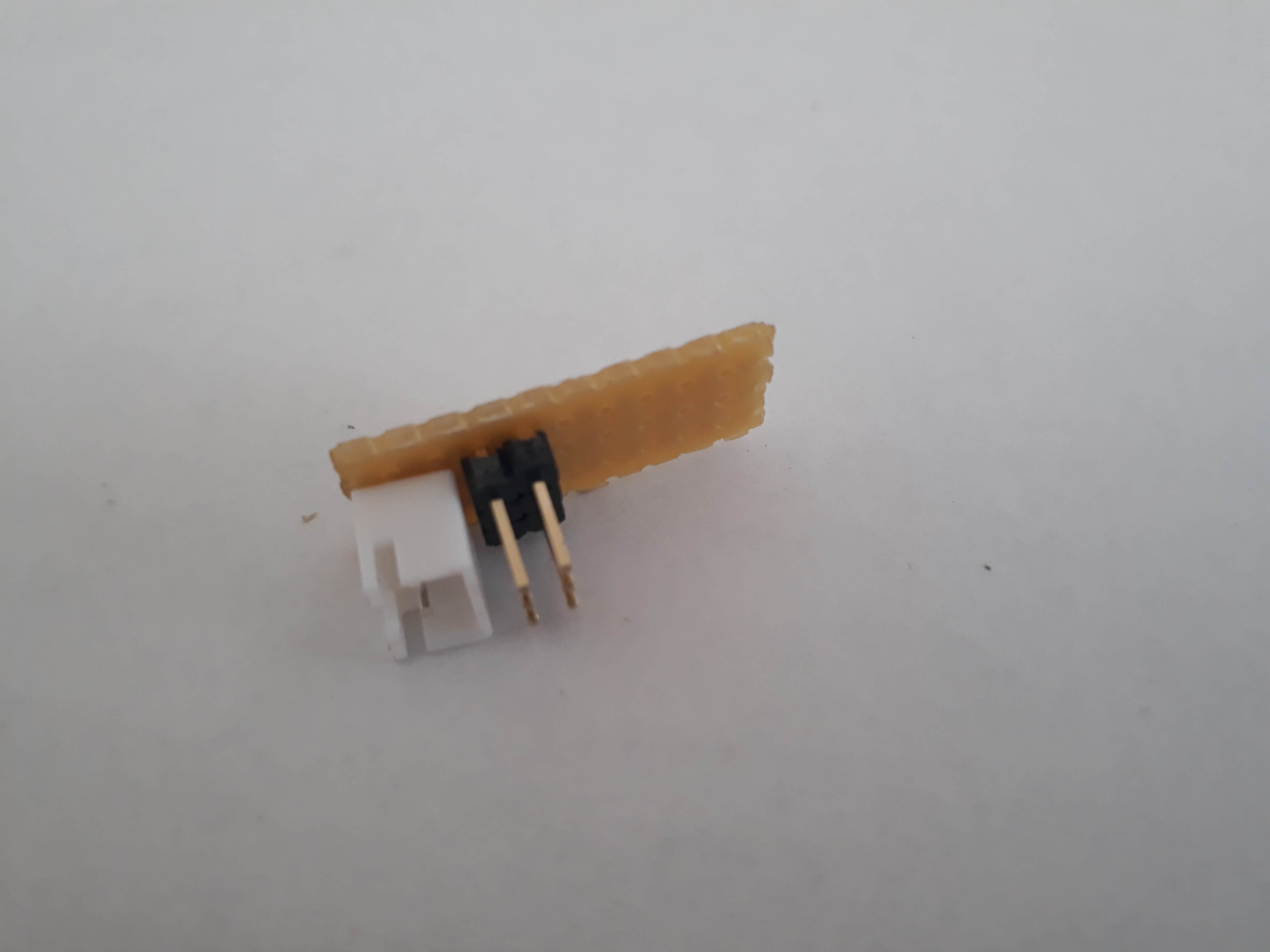
3. Connexion de la batterie
Vous pouvez soit souder les fils de la batterie directement soit rajouter un connecteur qui correspond à l’alimentation que vous utilisez en prenant soin de rajouter un interrupteur si vous voulez pouvoir déconnecter la batterie facilement. Pour ce projet, nous utilisons un connecteur JST.
4. Connexion de la carte
Vous devez ensuite souder les fils pour chaque entrée PWM ou sortie capteur et souder la masse de la carte Arduino à la masse de la carte contrôle des servomoteurs.

Votre driver de servomoteur est prêt à être utilisé

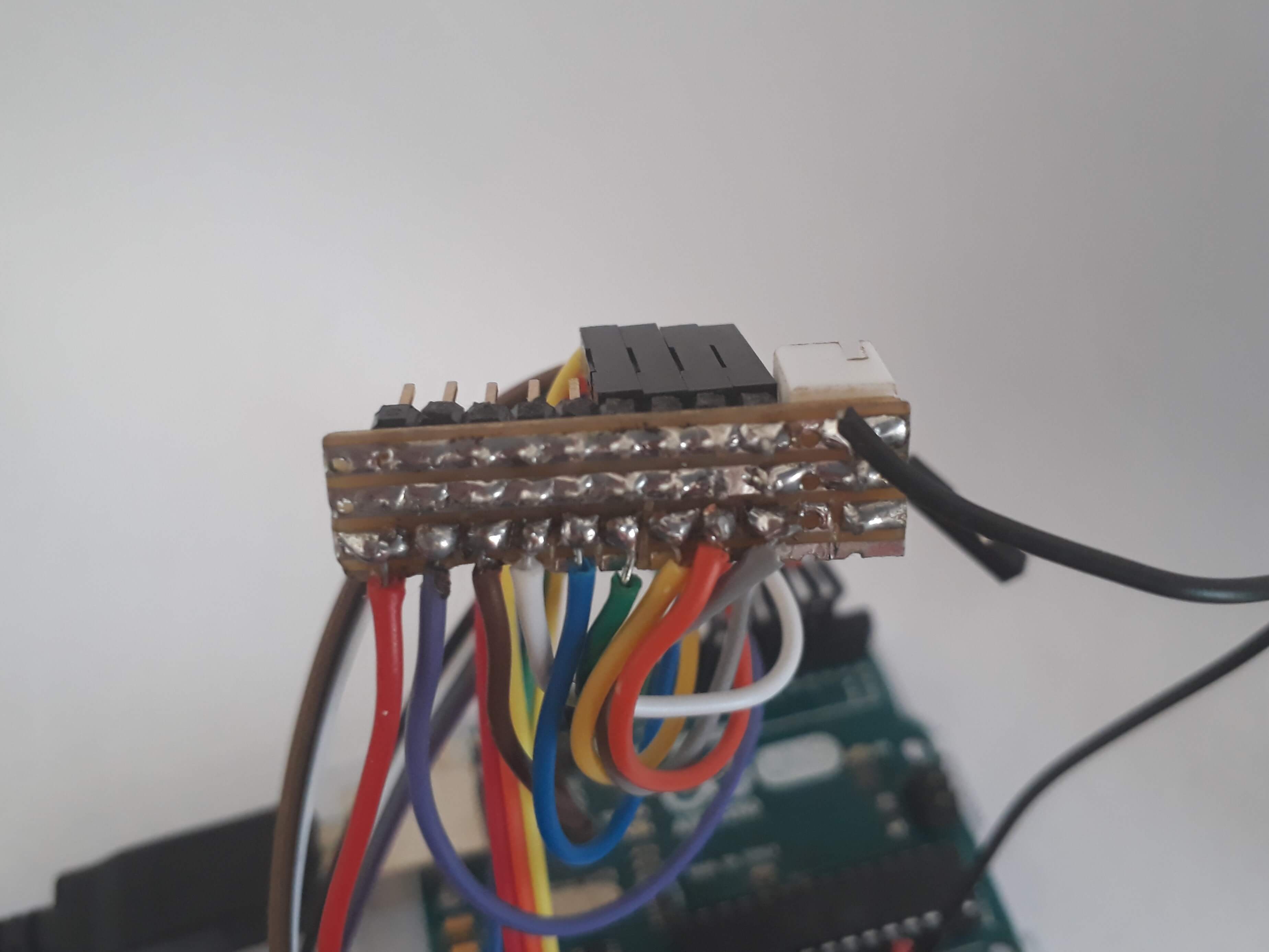
Résultat
Précaution
1. Vérifier la connexion de vos composants
2. Débranchez la batterie après utilisation
3. Débranchez la batterie si les servomoteurs vibrent de manière non désirée ou s’ils chauffent de manière anormale.
4. Il est possible d’utiliser la sortie 5V de l’Arduino pour un ou deux servomoteurs maximum. N’essayez pas d’en contrôler plus au risque d’endommager votre Arduino.
5. Ne pas branchez la borne 5V de l’alimentation sur la borne signal du servomoteur.
Conseil
- Lorsque vous voulez piloter un grand nombre de servomoteurs, vous pouvez rajouter un régulateur de tension.
- Pour apprendre à programmer votre carte Arduino pour piloter vos servomoteurs, c’est ici.
Références
- http://www.instructables.com/id/How-to-cut-pin-headers/
- Vous pouvez trouver des références de carte de prototypage perforée:
- https://www.digikey.fr/products/fr/prototyping-products/prototype-boards-perforated/636
- http://www.instructables.com/id/Slice-Circuit-Boards-with-a-Paper-Cutter/