

O módulo MPU6050 é uma plataforma inercial que mede a evolução de um objeto no espaço. Ele permite medir acelerações lineares e angulares nos três eixos do espaço. Este componente é encontrado em várias aplicações, incluindo consoles de video game e smartphones. Ele também pode ser utilizado para controlar a atitude de um drone ou para equilibrar um robô sobre duas rodas.
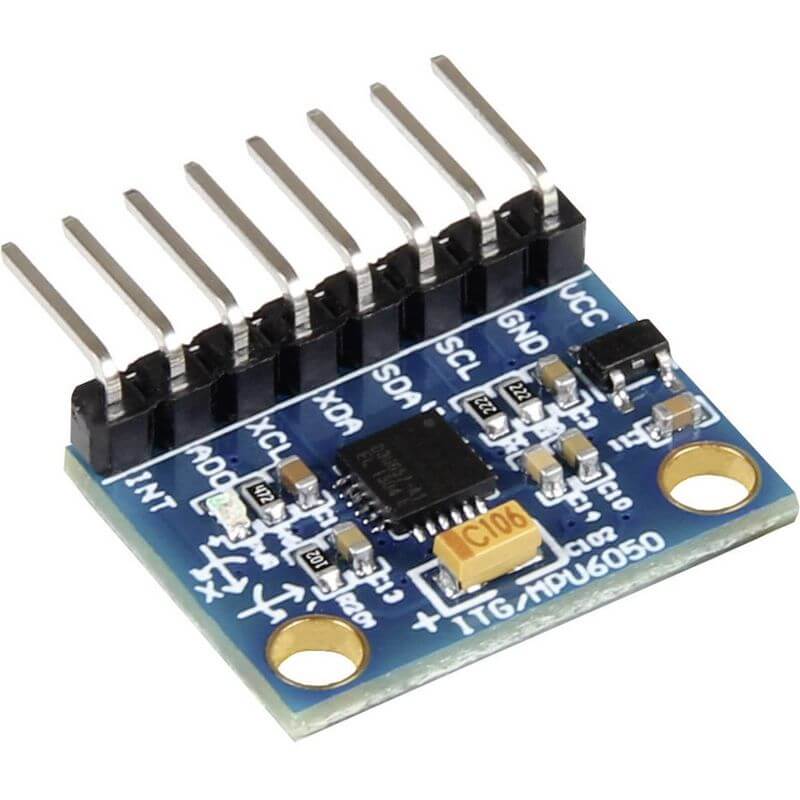
Neste tutorial, usaremos o módulo GY-521, no qual o MPU6050 está incorporado.
Pré-requisito: comunicação I2C
Material
- Computador
- Arduino UNO
- Cabo USB A Macho/B Macho
- MPU6050 (Módulo GY-521)
Princípio de funcionamento
O módulo GY-521 é uma placa de desenvolvimento para o sistema microeletromecânico MPU6050 (MEM- Microelectromechanical systems). O módulo MPU6050 é composto por um sensor de temperatura e dois sensores micromecânicos: um giroscópio para medir rotações e um acelerômetro para medir acelerações no espaço. Estes sensores possuem normalmente uma parte mecânica e uma parte piezoelétrica. Quando o objeto está em movimento, a parte mecânica move-se contra a parte piezoelétrica, que envia um sinal elétrico.
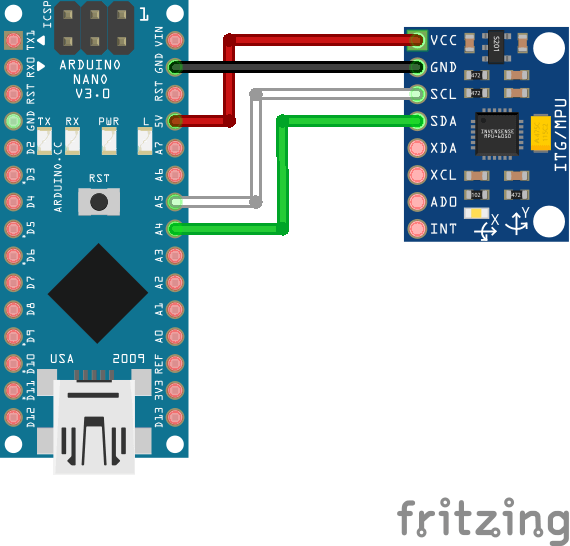
Esquema
O módulo GY-521 pode ser alimentado diretamente pelo pino 5V da placa Arduino. O módulo utiliza comunicação I2C para fazer interface com o microcontrolador.
- SDA no pino A4
- SCL no pino A5
- VCC no pino 5V
- GND no pino GND

Código
Para fazer interface com o módulo GY-521, e portanto com o MPU6050, utilizaremos a biblioteca com o mesmo nome, a Adafruit_MPU6050.h. É importante notar que, dependendo do módulo utilizado, poderá ser necessário modificar o endereço I2C para obter as medidas. O código aqui proposto é o programa básico para exibir e utilizar as medições do sensor. A biblioteca oferece muitas outras configurações e parâmetros. Para mais funcionalidades, não hesite em consultar a documentação e os exemplos da biblioteca.
//Libraries
#include <Wire.h>//https://www.arduino.cc/en/reference/wire
#include <Adafruit_MPU6050.h>//https://github.com/adafruit/Adafruit_MPU6050
#include <Adafruit_Sensor.h>//https://github.com/adafruit/Adafruit_Sensor
//Objects
Adafruit_MPU6050 mpu;
void setup() {
//Init Serial USB
Serial.begin(9600);
Serial.println(F("Initialize System"));
if (!mpu.begin(0x69)) { // Change address if needed
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
mpu.setAccelerometerRange(MPU6050_RANGE_16_G);
mpu.setGyroRange(MPU6050_RANGE_250_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
}
void loop() {
readMPU();
delay(100);
}
void readMPU( ) { /* function readMPU */
////Read acceleromter data
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the values */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println("°C");
}
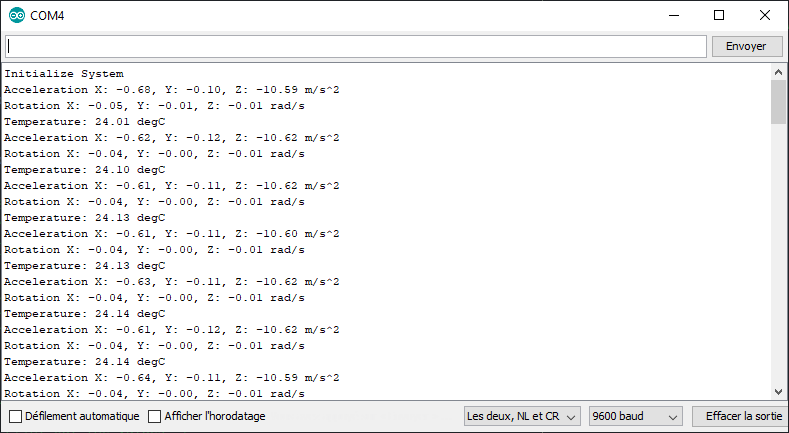
Resultado
Depois de carregar o código no Arduino, pode mover o sensor para observar os valores de aceleração evoluírem nas diferentes direções do espaço. Também pode verificar o funcionamento do sensor de temperatura encostando o seu dedo no módulo.

Aplicações
- Estabilizar um drone
- Controlar um robô com movimentos manuais
- Dar equilíbrio a um robô de duas rodas
Fontes
- https://github.com/ElectronicCats/mpu6050/blob/master/src/MPU6050.h
- https://www.arduino.cc/en/reference/wire
- https://github.com/adafruit/Adafruit_MPU6050
- https://github.com/adafruit/Adafruit_Sensor
Retrouvez nos tutoriels et d’autres exemples dans notre générateur automatique de code
La Programmerie