
Création d’un lampe avec un interrupteur tactile
Une des applications des capteurs capacitifs est la création d’un interrupteur tactile pour allumer une lampe, par exemple. Dans ce projet, nous allons concevoir un capteur capacitif avec Arduino que nous allons utiliser comme un interrupteur tactile pour...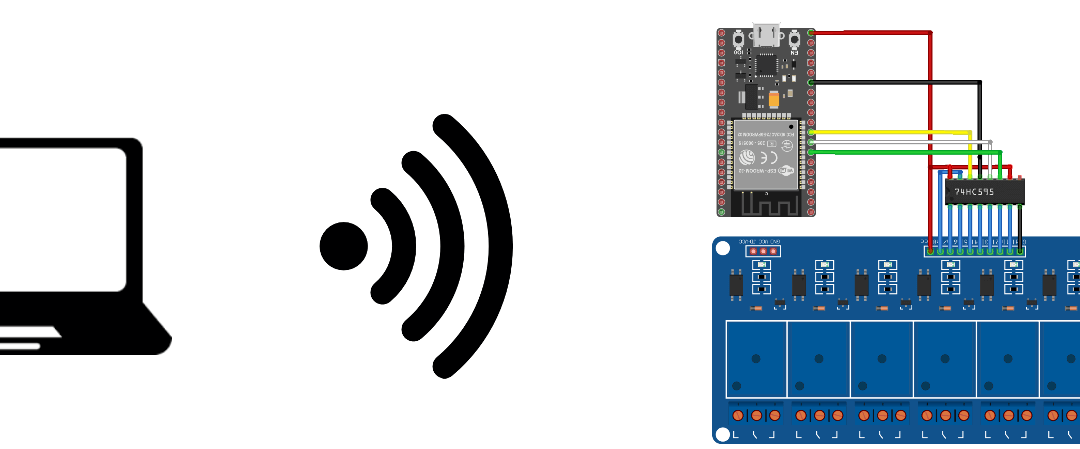
Pilotez 8 relais à l’aide d’un ESP32 et d’une interface Web
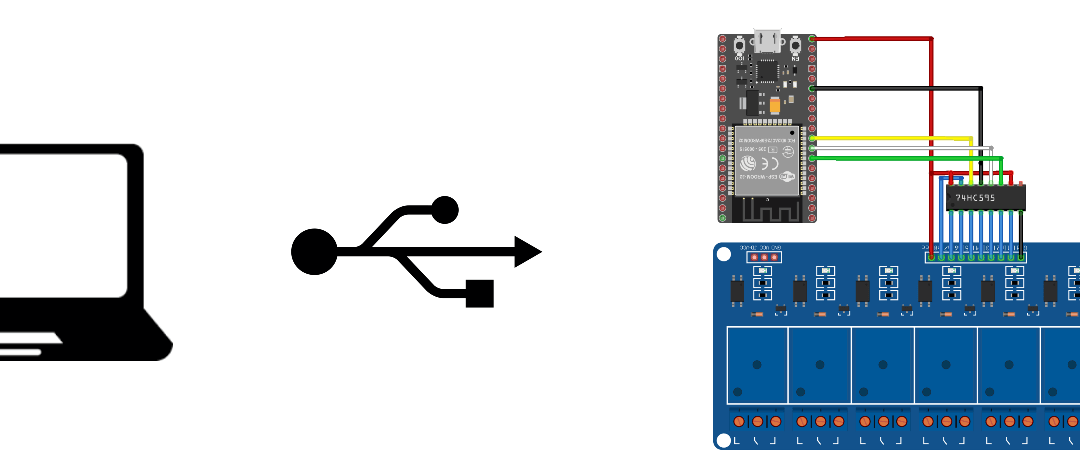
Pilotez 8 relais à l’aide d’un ESP32 et du moniteur série
Dans ce tutoriel, nous allons voir comment adresser chaque relais individuellement avec un microcontrôleur NodeMCU32S et des registres à décalages 74HC595. A l’issue de ce tutoriel, vous serez aussi capable de piloter chaque relais à l’aide du moniteur...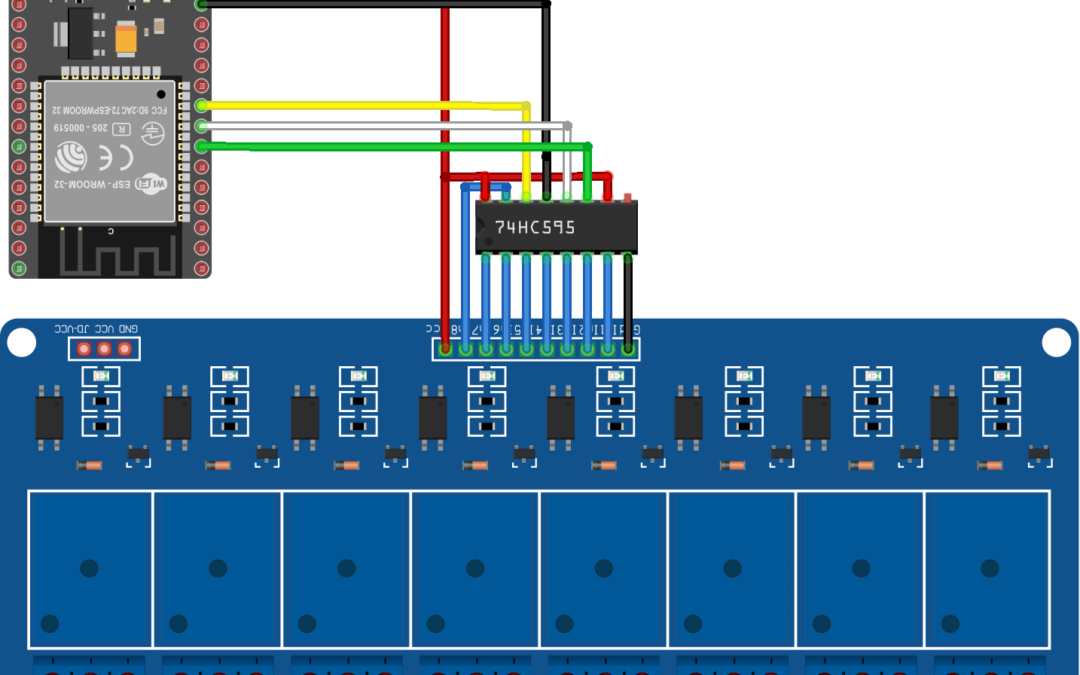
Piloter 8 relais avec un ESP32 et un registre à décalage
Dans cette série de tutoriels, nous allons voir comment piloter une multitude de relais avec un microcontrôleur NodeMCU32S et des registres à décalages 74HC595. Nous allons ensuite voir comment adresser chaque relais individuellement. Enfin, nous allons créer une...Produits
-
 Microcontrôleur Arduino UNO
20,83€
Microcontrôleur Arduino UNO
20,83€
-
 Support servomoteur latéral avec guide
Gratuit
Support servomoteur latéral avec guide
Gratuit
-
 Fichier STL QuadrinaV1
1,50€
Fichier STL QuadrinaV1
1,50€
-
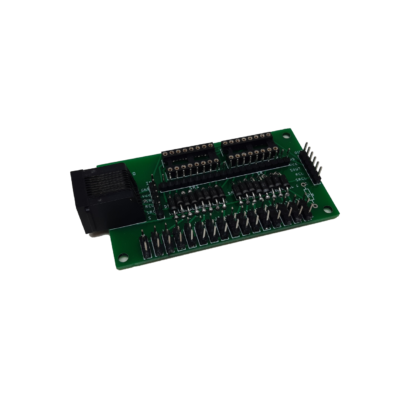 AC SRx2 Module
11,67€
AC SRx2 Module
11,67€
-
 NodeMCU ESP32 (ESP-WROOM-32)
9,17€
NodeMCU ESP32 (ESP-WROOM-32)
9,17€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license