
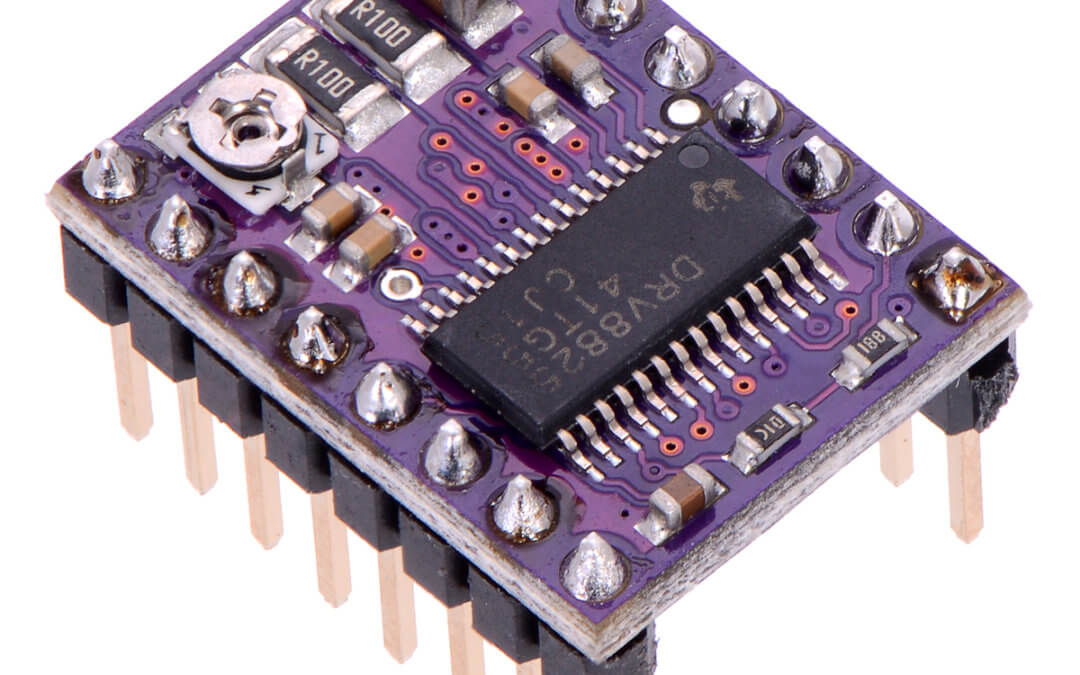
Utilizar um controlador de motor passo a passo DRV8825
Neste tutorial, veremos como acionar um motor de passo bipolar utilizando um controlador DRV8825. Este tutorial é compatível com os drivers de motor de passo normalmente utilizados em projectos de fresagem digital ou de impressoras 3D (DRV8825, SilentStepStick, etc.)....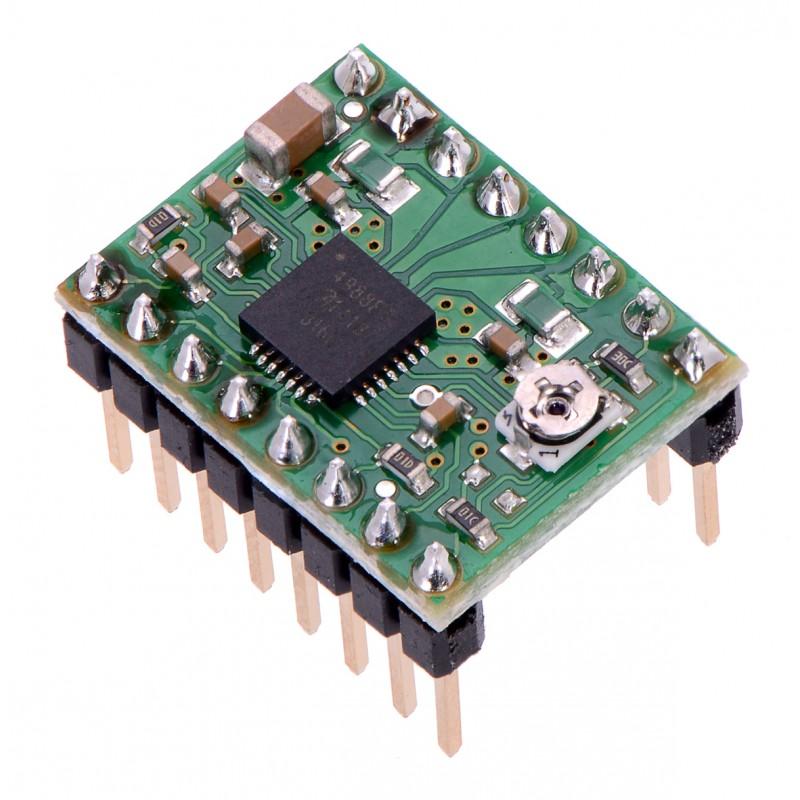
Utilizar um controlador de motor passo a passo A4988
Neste tutorial, vamos ver como acionar um motor de passo bipolar utilizando um controlador A4988. Este tutorial é compatível com os drivers de motor de passo normalmente utilizados em projectos de fresagem digital ou de impressoras 3D (DRV8825, SilentStepStick, etc.)....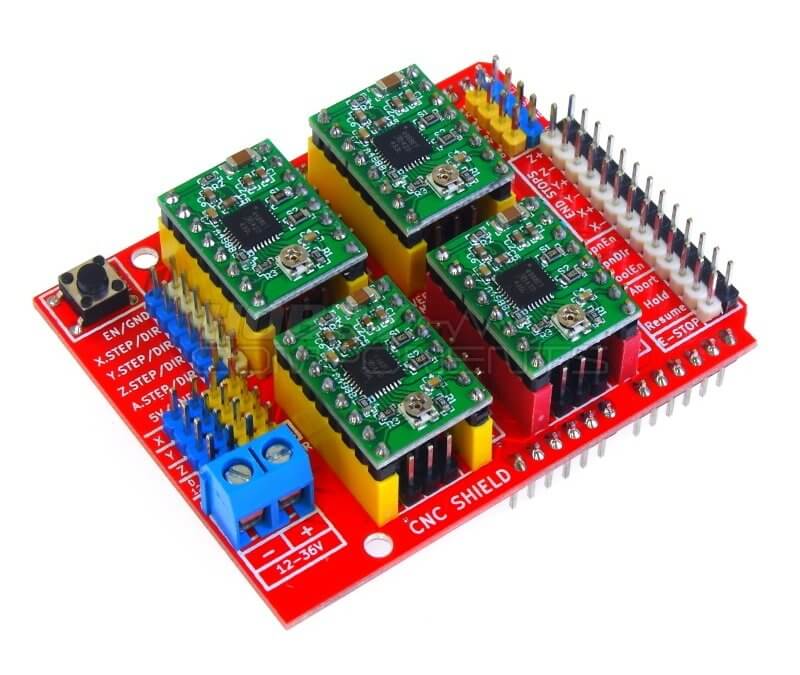
Usando um Arduino CNC Shield V3
Neste tutorial, veremos a utilização do Escudo CNC V3 para Arduino. Para poder gerir uma máquina como uma CNC ou uma impressora 3D com vários motores passo a passo, é interessante ter uma placa que facilite a ligação dos diferentes elementos da máquina. Este é o papel...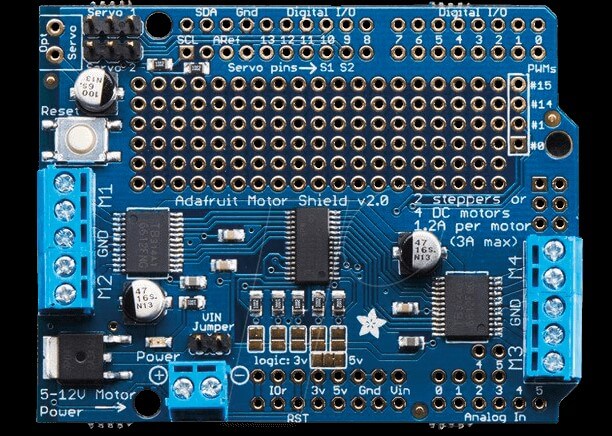
Controlar vários motores com o Motor Shield V2
O Motor Shield V2 é uma placa de extensão para os microcontroladores Arduino UNO e Mega, para controlar motores de corrente contínua e motores de passo. Para controlar motores, é possível utilizar circuitos integrados diretamente, mas isso requer uma cablagem extensa...License
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license