
Programação com OpenCV e VS Code em C++
Vamos programar utilizando OpenCV e C++ no VS Code. A configuração do VS Code e das bibliotecas para determinadas linguagens pode ser complicada. Neste tutorial, veremos como configurar um computador e o VS Code para poder desenvolver com OpenCV e C++. Pré-requisitos...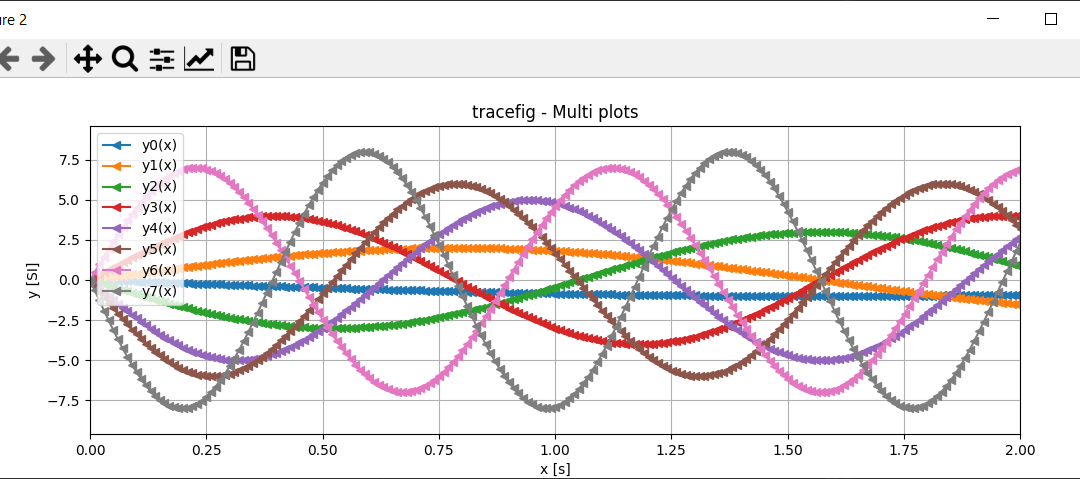
Criar gráficos com Matplotlib em Python
O pacote Matplotlib Python é uma ferramenta poderosa para criar gráficos e analisar dados em formato gráfico. Neste tutorial, vamos ver como utilizar esta biblioteca e algumas das caraterísticas que precisa de conhecer. Instalar o Matplotlib A biblioteca Matplotlib é...Teste e otimização do código C/C++ com GNU
Otimização do código C para sistemas incorporados A otimização do código C é necessária para os sistemas incorporados porque, para poupar nos custos de hardware, planeamos o mínimo necessário em termos de interface, memória e capacidade de computação. No entanto, para...
Programação em Python com VSCode
O editor de código VSCode permite-lhe criar e desenvolver projectos numa série de linguagens de programação, incluindo Python e C++, graças a uma série de extensões. Instalar o VSCode Se ainda não o tiver feito, transfira e instale o VSCode Utilizar um editor de...
Programar um ESP32 com VSCode e ESP-IDF
Neste tutorial, veremos como programar um ESP32 usando o ambiente ESP-IDF com VSCode. O ESP-IDF, ou Espressif IoT Development Framework, é o ambiente de programação oficial para ESP32s e permite que aplicações de alta qualidade sejam programadas em C e C++. ESP-IDF vs...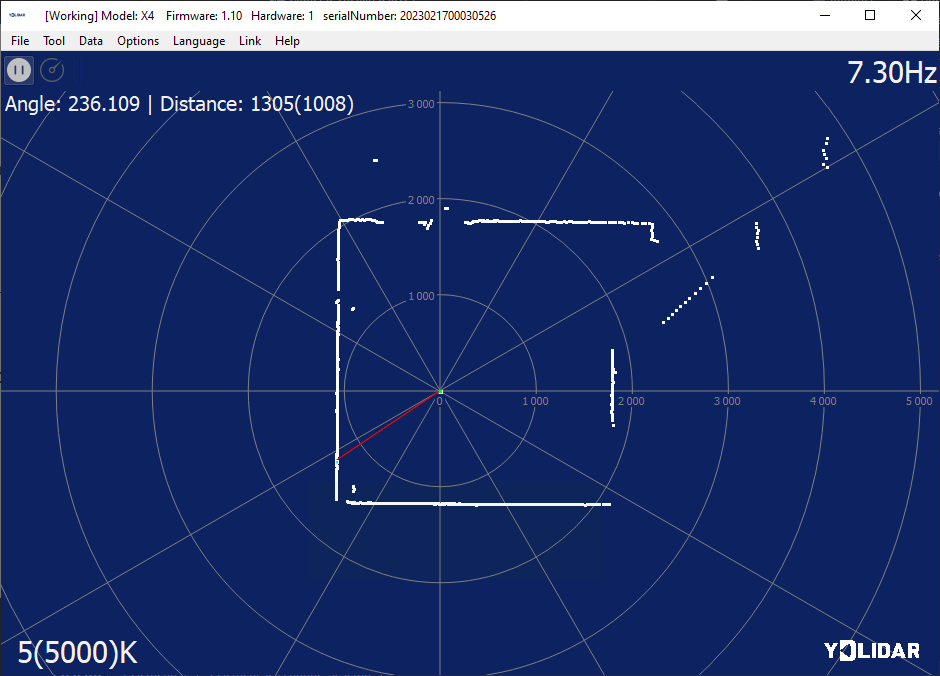
Utilizar um sensor Lidar com Python
Neste tutorial, vamos ver como configurar um mapa utilizando um sensor Lidar em Python. O sensor Lidar é utilizado para encontrar as suas coordenadas no espaço e para mapear. Descrição do sensor Lidar O sensor lidar é um sensor de distância a laser acoplado a um motor...Configurar o RetroPie no Raspberry Pi
O microcomputador Raspberry Pi tem uma série de utilizações comuns, incluindo jogos retro com o RetroPie. Neste tutorial, veremos como instalar, configurar e usar o RetroPie num Raspberry Pi. Hardware Raspberry Pi 4 ou outra placa compatível ecrã+teclado+rato...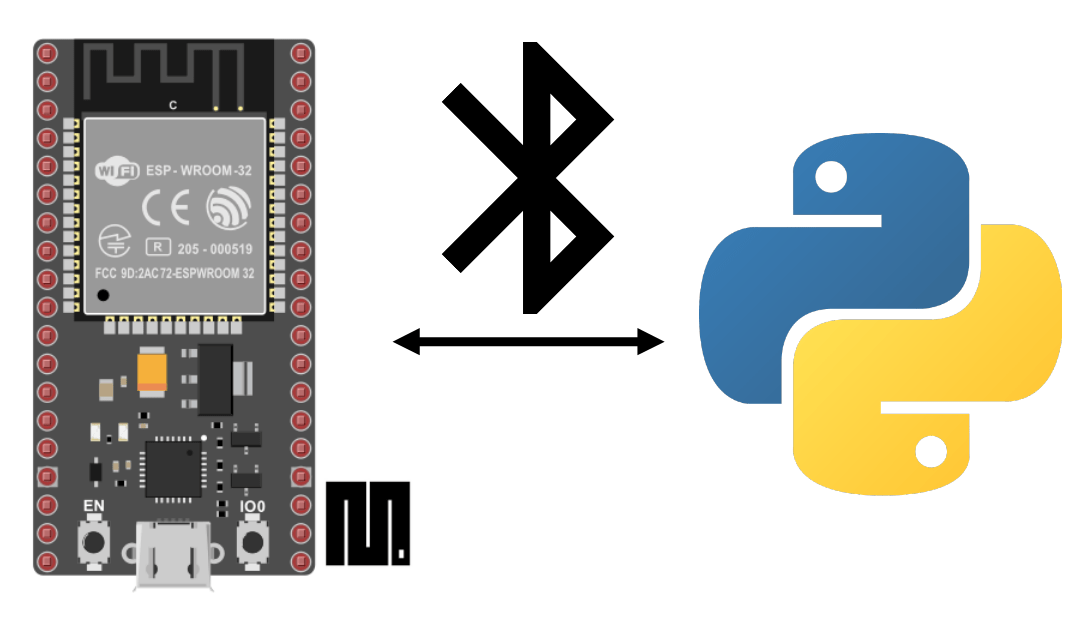
Gerenciando BLE em um ESP32 com MicroPython
Neste tutorial, aprenderemos a gerenciar e testar a comunicação BLE (Bluetooth Low Energy) em um ESP32 usando MicroPython. Equipamento Um módulo ESP32 Um computador com Python instalado Cabo USB para ligação ao computador ESP32 Um dispositivo Android Configuração do...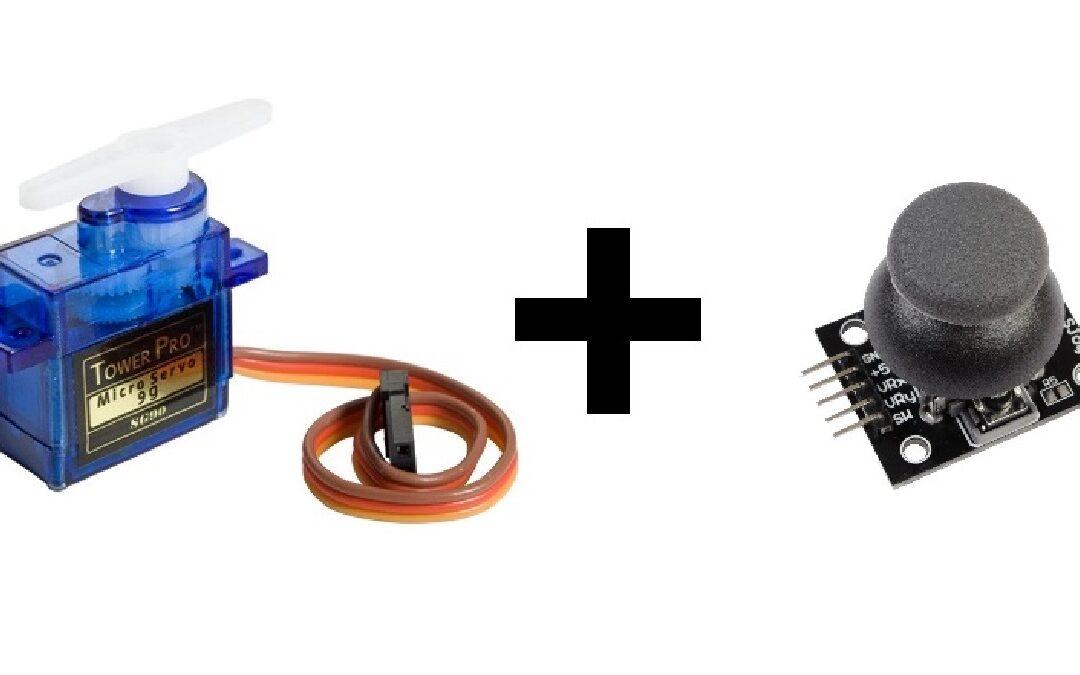
Controlo de servomotores com um joystick Arduino
Um dos principais objectivos da robótica é articular objectos. E para isso, podemos também atuar sobre a articulação dos objectos através da ação do utilizador diretamente no sistema. Neste artigo, vamos ver como programar a placa Arduino para controlar servomotores...License
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license