
Programmer une carte Teensy avec Teensyduino
Dans ce tutoriel, nous allons voir comment programmer une carte teensy avec Teensyduino et l’IDE d’Arduino. Les microcontrôleurs Teensy sont des cartes de développement possédant une architecture ARM. Ils possèdent une forte puissance de calcul, un grand...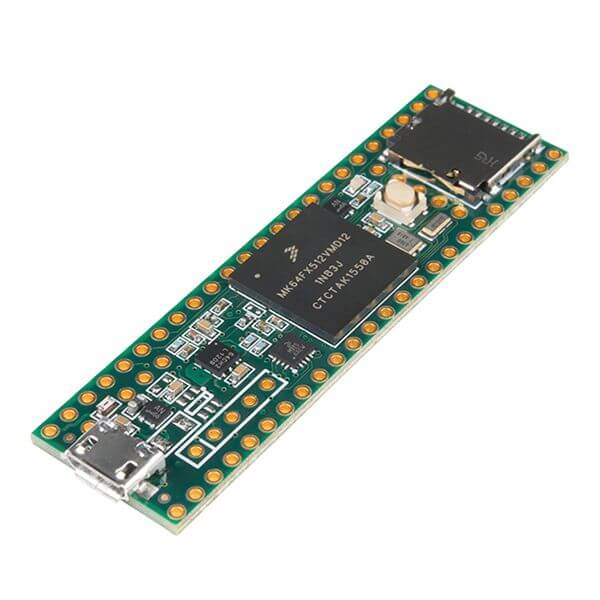
Vue d’ensemble du microcontrôleur Teensy 3.5
La carte Teensy 3.5 est une carte de développement équipé d’un processeur ARM 32-bits. Elle possède un grand nombre d’interface et une grande puissance de calcul, ce qui permet de l’utiliser dans bon nombre d’application. Elle permet notamment...Produits
-
 Microcontrôleur Arduino UNO
20,83€
Microcontrôleur Arduino UNO
20,83€
-
 Microcontrôleur Arduino Mega 2560 Rev3
35,00€
Microcontrôleur Arduino Mega 2560 Rev3
35,00€
-
 Support servomoteur lateral
Gratuit
Support servomoteur lateral
Gratuit
-
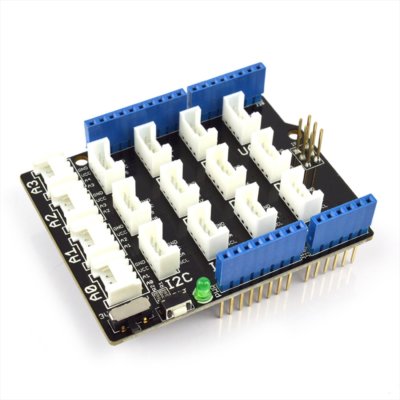 Grove I/O Base Shield
5,33€
Grove I/O Base Shield
5,33€
-
 Support servomoteur horizontal
Gratuit
Support servomoteur horizontal
Gratuit
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license