Controla un Servo con Arduino
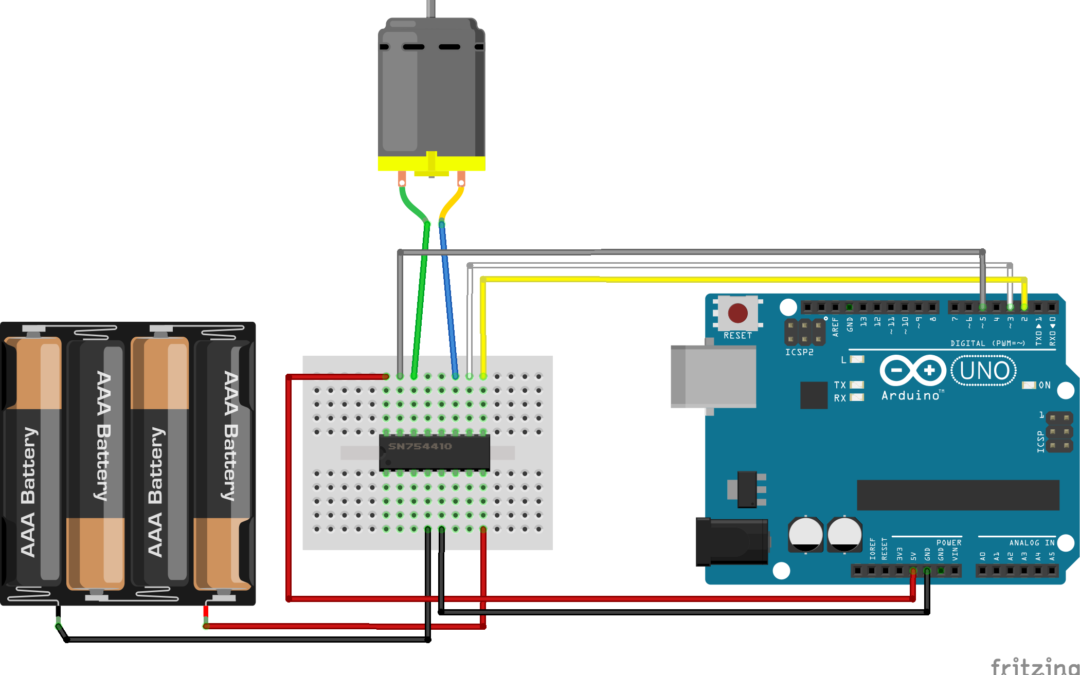
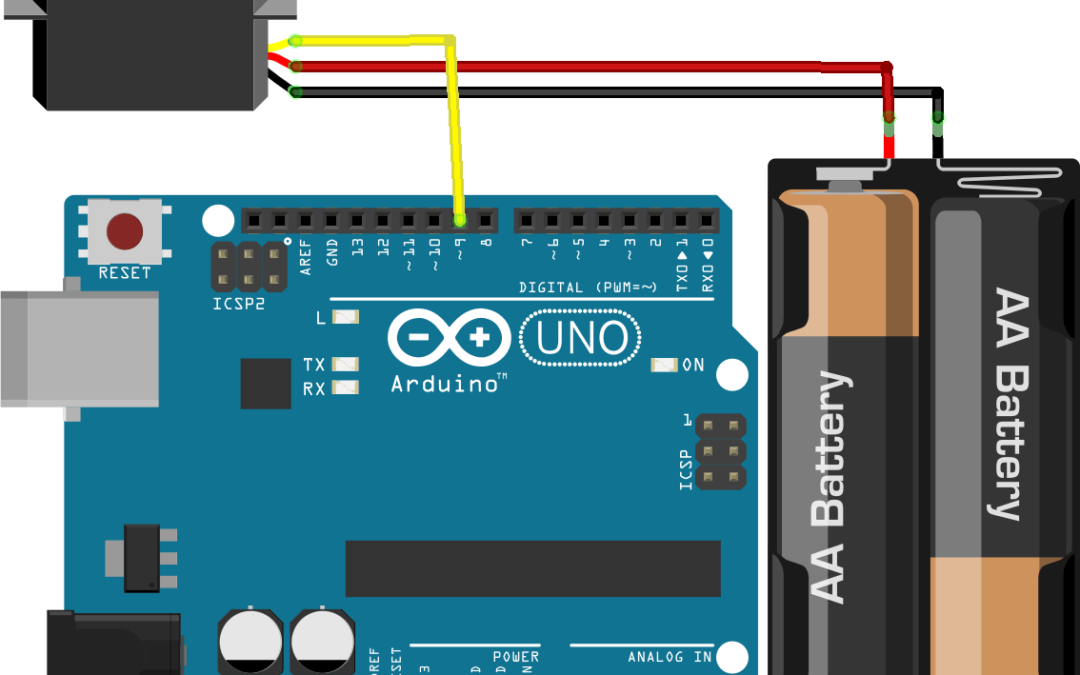
Uno de los principales objetivos de la robótica es que el robot se mueva. Por eso, es muy común utilizar motores eléctricos y particularmente servomotores. En este artículo, programamos el Arduino para que pueda manejar un servomotor e iremos más allá en el uso de...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license