
Installer Arduino IDE sur Raspberry Pi
Nous allons voir dans ce tutoriel comment installer le logiciel Arduino IDE et CLI sur Raspberry Pi et ainsi combiner les forces des deux systèmes. Vérifier la configuration de votre système Pour savoir quelle version de l’IDE télécharger et installer, vous...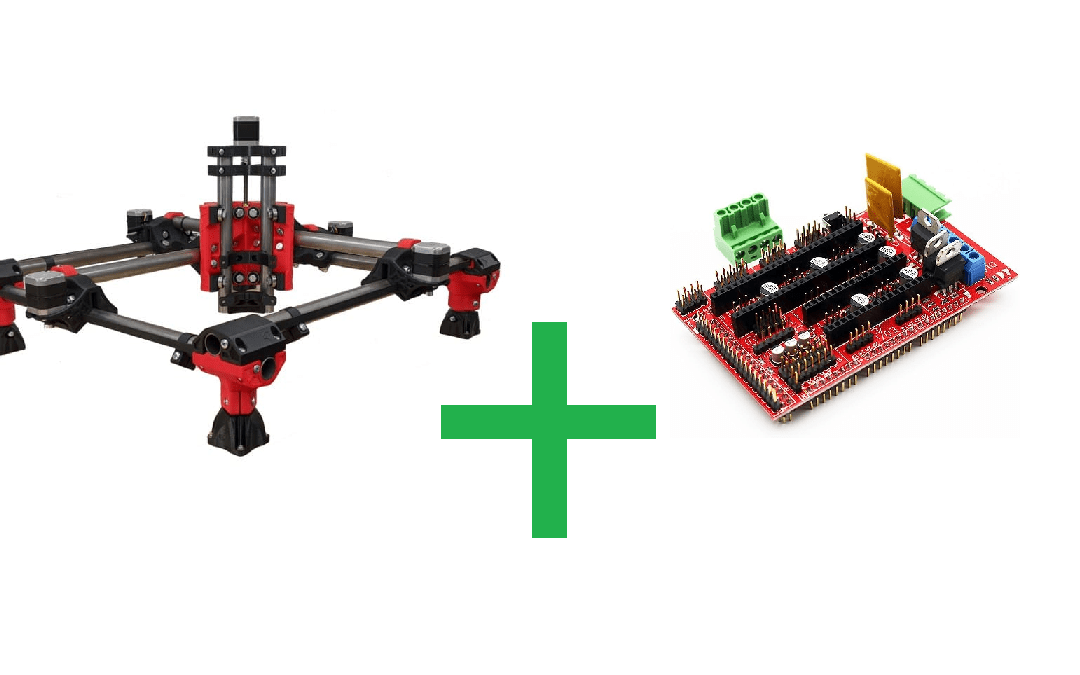
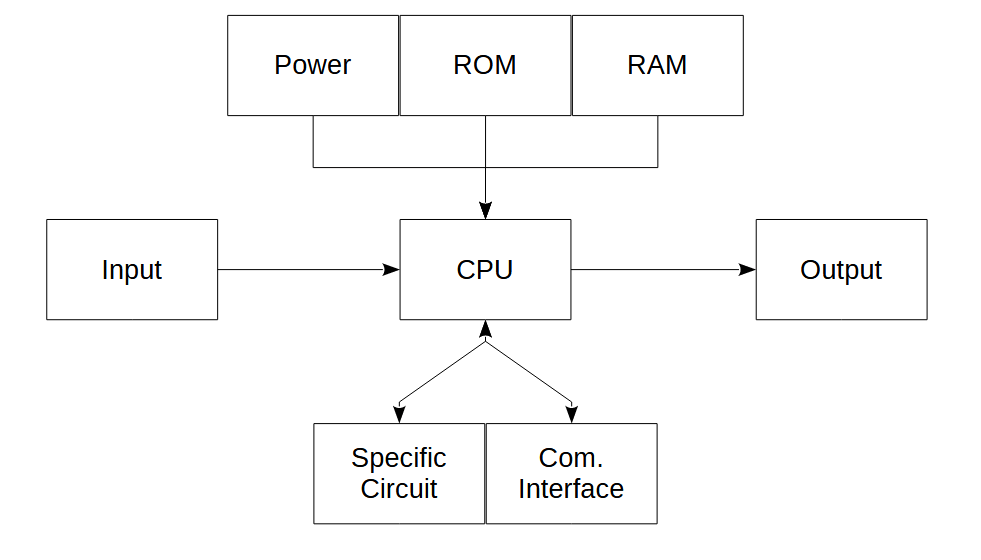
Installation et câblage d’une carte Ramps 1.4 pour une MPCNC
Une MPCNC est l’acronyme de « Mostly Printed CNC », ce qui signifie qu’elle est principalement construite à partir de pièces imprimées en 3D. Il s’agit d’une machine CNC (Computer Numerical Control) qui permet de réaliser des opérations...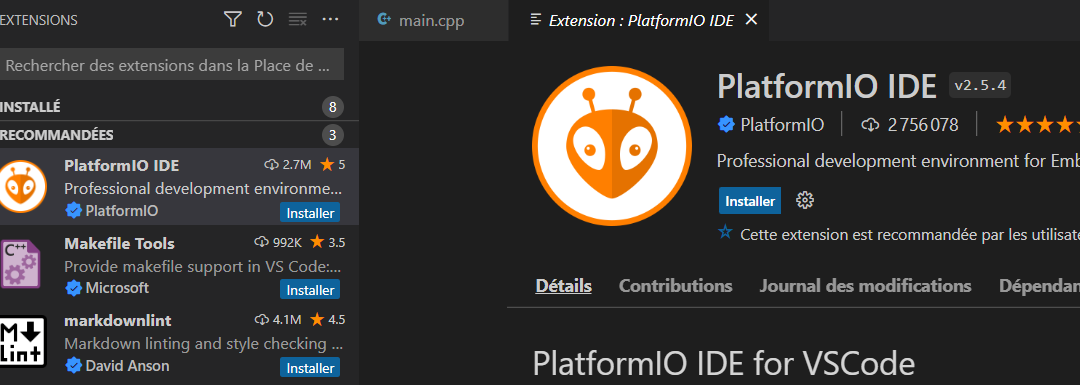
Installer PlatformIO IDE sur Visual Studio Code
Dans ce tutoriel nous allons configurer Visual Studio Code pour pouvoir lancer des scripts C/C++ avec PlatformIO IDE, qui est très utile pour programmer des microcontrôleurs tels que Arduino ou ESP32. Matériel Ordinateur Carte Arduino UNO ou autre Câble USB pour...
Utilisation d’un écran Nextion avec Arduino
L’écran Nextion est une des meilleures solutions pour créer une interface graphique afin de piloter votre projet Arduino. L’interface la plus connue pour interagir avec un Arduino est l’écran LCD avec quelques boutons et potentiomètres au prix des...Produits
-
 Fichier STL Rovy
Gratuit
Fichier STL Rovy
Gratuit
-
 Moteur CC TT avec réducteur double-axe DG01D
3,00€
Moteur CC TT avec réducteur double-axe DG01D
3,00€
-
 Microcontrôleur Arduino Mega 2560 Rev3
35,00€
Microcontrôleur Arduino Mega 2560 Rev3
35,00€
-
 Support capteur V1
Gratuit
Support capteur V1
Gratuit
-
 Fichier STL QuadrinaV1
1,50€
Fichier STL QuadrinaV1
1,50€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license