Une MPCNC est l’acronyme de « Mostly Printed CNC », ce qui signifie qu’elle est principalement construite à partir de pièces imprimées en 3D. Il s’agit d’une machine CNC (Computer Numerical Control) qui permet de réaliser des opérations d’usinage, de gravure, de découpe ou de fraisage sur différents matériaux tels que le bois, le plastique ou l’aluminium. La MPCNC est conçue pour être abordable et facile à construire, grâce à son architecture modulaire et à l’utilisation de composants électroniques couramment disponibles. Elle est basée sur le principe de la fraiseuse à portique ou un Laser, où un chariot mobile se déplace le long de 3 axes (X et Y principalement, et Z pour régler la hauteur de l’outil légèrement ) tandis que l’outil effectue les opérations sur le matériau. La MPCNC peut être contrôlée par un logiciel de commande numérique, qui envoie des instructions précises aux moteurs pour déplacer les axes selon les coordonnées spécifiées.
Ici, nous nous appuyons sur la MPCNC de V1 Engineering, pour construire notre propre Graveuse et Découpe Lase. Nous aborderons essentiellement le câblage de la Machine, le guide technique pour imprimer et monter les pièces se trouvant sur le site de V1 Engineering.
La carte Ramps 1.4 est une carte d’extension électronique utilisée dans les imprimantes 3D et les machines CNC. Le terme « Ramps » est un acronyme pour « RepRap Arduino Mega Pololu Shield ». Elle est spécifiquement conçue pour fonctionner avec la plateforme Arduino Mega et offre une interface de contrôle pour les moteurs pas à pas, les capteurs, les fins de course, les ventilateurs, etc. La carte Ramps 1.4 est dotée de plusieurs emplacements pour les pilotes de moteurs pas à pas Pololu A4988 ou DRV8825, qui fournissent la puissance nécessaire pour contrôler les moteurs de la machine CNC ou de l’imprimante 3D. Elle intègre également des connecteurs pour les thermistances, les ventilateurs de refroidissement, les afficheurs LCD, les boutons de commande et d’autres périphériques. La carte Ramps 1.4 est compatible avec divers logiciels de contrôle, des firmware, tels que Marlin ou GRBL, qui permettent de gérer précisément les mouvements des moteurs et de superviser l’impression ou l’usinage en cours.
Matériel
- Carte Ramps 1.4
- Arduino Mega 2560
- 5 Moteurs pas à pas : 17HS15-1504S-X1
- 3 Pilotes de moteurs pas à pas : DRV8825
- Alimentation Sortie 12V et 20A: S-250-12
- 1 Laser 20W : LD4070HA
- Des fils.
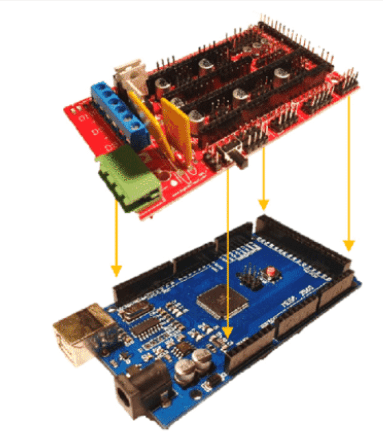
Montage Ramps 1.4 sur Arduino Mega
Après avoir monté la structure de votre MPCNC, il vous faut monter la partie électronique, et pour cela, on commence avec la Ramps 1.4. Comme décrit précédemment, c’est un Shield pour carte Arduino Mega, ce qui rend le montage assez simple. Il suffit d’empiler les broches et les pins des 2 cartes :
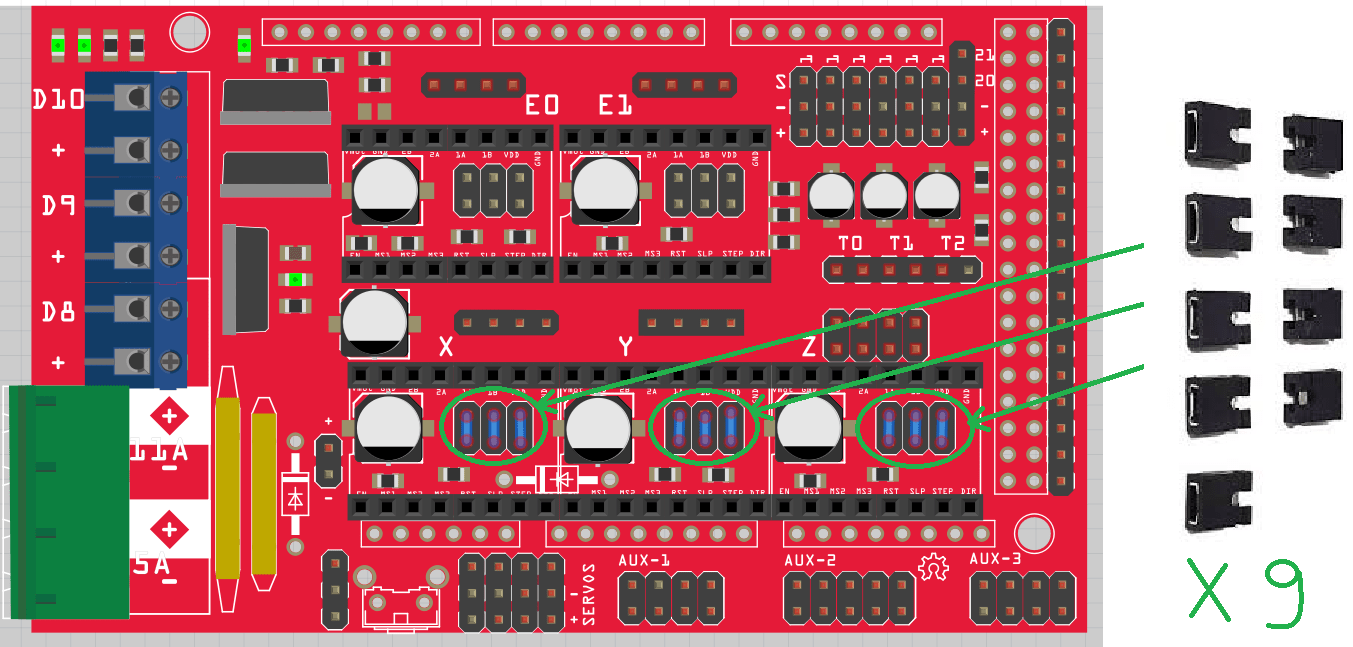
Ensuite on vient placer les jumpers pour les drivers. Il faut relier les pins qui se trouveront sous les drivers sur la carte tel que :
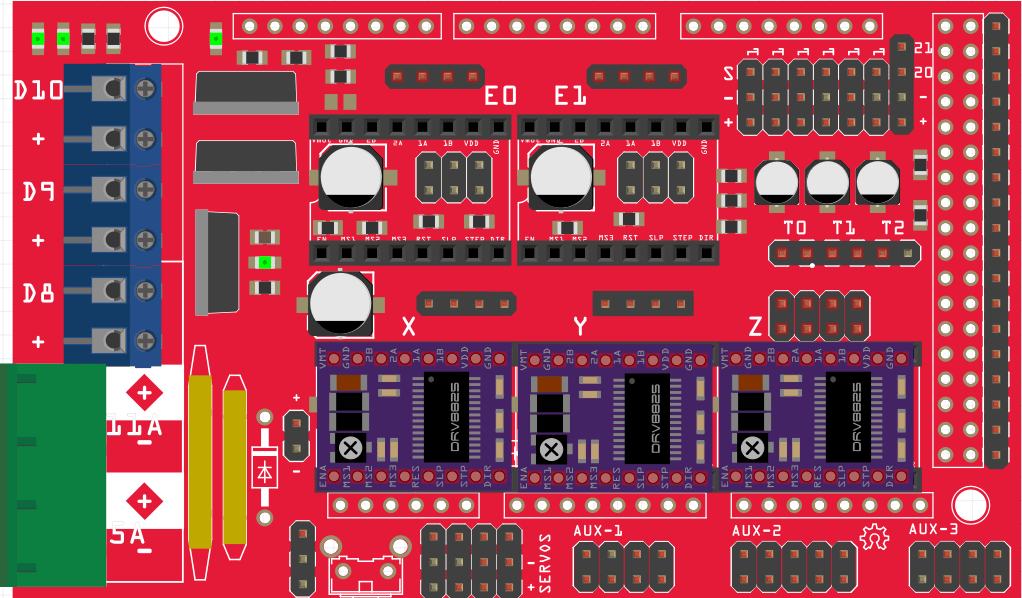
Ensuite, on passe aux pilotes des moteurs pas à pas qui permettent la communication entre les moteurs et la carte. Ils ont aussi une fonction très importante de limiter le courant dans les moteurs pour éviter les surchauffes. Il suffit de les enfoncer dans les pins juste des jumpers tel que :
Réglage du potentiomètre de chaque driver
Il est TRÈS important de faire cette étape correctement, si le courant est trop élevé, cela provoque une surchauffes moteurs qui finit par les abîmer sur des longues durées.
Commençons par calculer le courant maximum à laisser passer dans les moteurs. Pour cela il faut vous référer à l’équation qui limite le courant dans la datasheet de votre Pilote.
Ici, pour les DRV8825, on a l’équation suivantes : Limit Current = VREF x 2
VREF est la tension qu’on mesure aux bornes du pilote et qu’on règle avec le potentiomètre et Limite Current est le Courant/Phase consommé par votre moteur, valeur indiqué dans la datasheet de votre moteur pas à pas. Ici, pour les 17HS15-1504S-X1 on Courant/Phase = 1,5 A
Donc pour savoir la valeur de VREF, on a VREF = Limite Current / 2 = 1,5 / 2 = 0,75 V.
Cependant, ici, nos moteurs pas à pas ne portent pas de charges lourdes, qui nécessitent davantage de courant. 0,75 V étant le maximum, on peut réduire cette valeur pour limiter la surchauffe des moteurs, à 60%. Soit VREF(diminué) = 0,75 x 0,6 = 0,45 V.
Maintenant, après avoir branché votre carte à l’alimentation 12V ( pensez bien à régler la tension de sortie de l’alimentation avec un tournevis et en mesurant la tension aux bornes des sorties ), munissez vous d’un multimètre pour mesurer VREF aux bornes du pilote comme ceci :
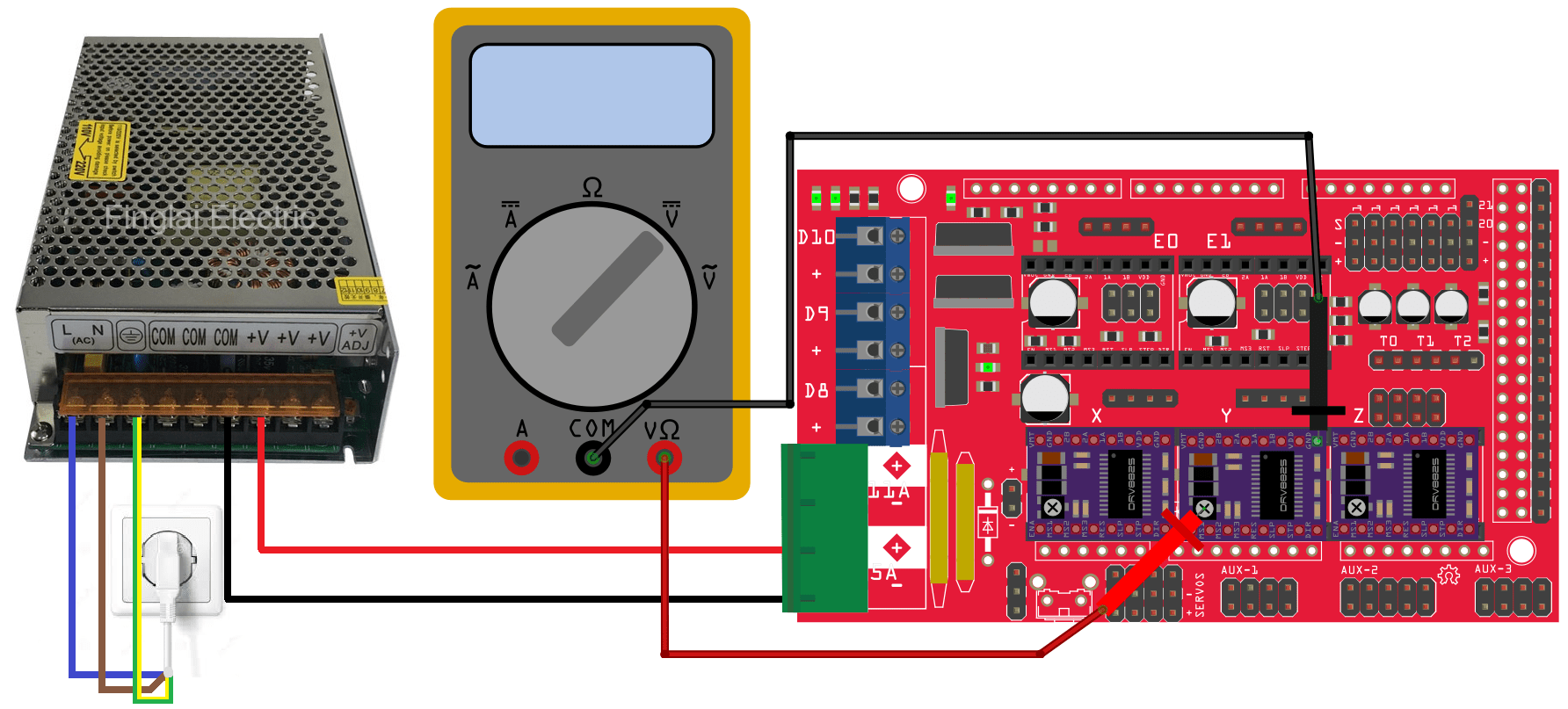
Vous pouvez mesurer directement VREF entre la masse du pilote et sur le potentiomètre directement. Pour régler, il vous faudra un tournevis assez fin pour manipuler la vis du potentiomètre et changer la valeur VREF à la tension souhaitée, ici 0,45V.
Branchement des moteurs pas-à-pas
Une fois votre VREF réglé, vous pouvez brancher les moteurs pas-à-pas. On remarque alors ici sur notre machine, nous avons deux moteurs pas-à-pas pour chacun des axes X et Y, ce qui nécessite de les brancher en séries pour qu’ils puissent être contrôler par le même pilote. On peut aussi les brancher en parallèle mais nous vous déconseillons fortement car cela consommerait davantage de courant.
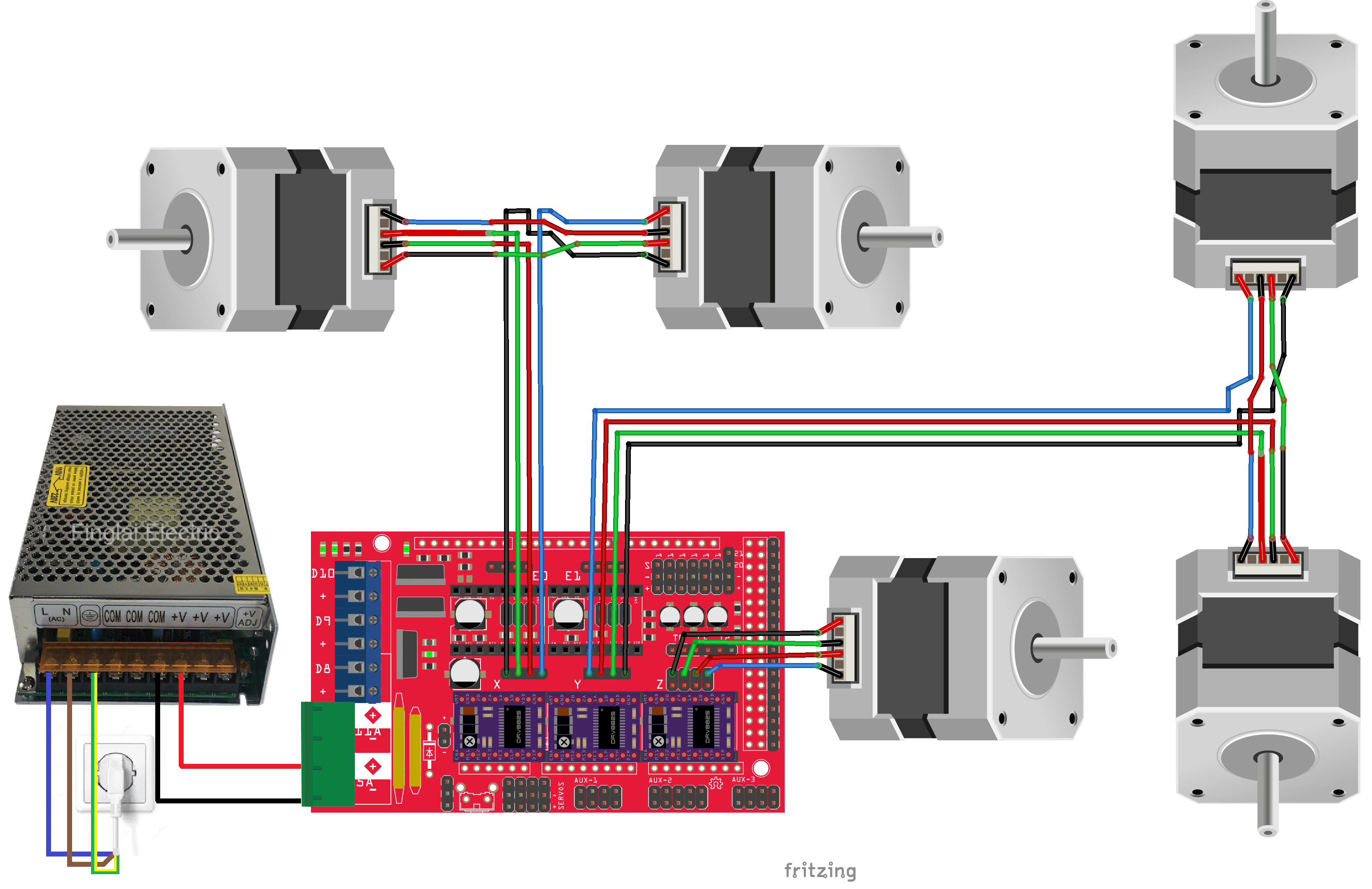
Vous pouvez remarquer que les moteurs pas-à-pas sont branchés en séries, ce qui implique de couper des câbles et de les resouder. Les couleurs représentés sur ce schéma sont celles des couleurs de câbles usuellement vendu avec des moteurs pas-à-pas. Faites bien attention à l’ordre des câbles lors des branchements. Aussi, on peut remarquer que l’axe Y le sur schéma n’as pas les couleurs de câbles dans le même ordre que les autres, mais un ordre inversé. C’est normal, vous pouvez inverser l’ordre des couleurs branchés sur la carte Ramps 1.4 pour inverser le sens de rotation des moteurs, pour qu’ils correspondent à votre installation. Il faudra faire des tests pour savoir s’ils tournent dans le bon sens.
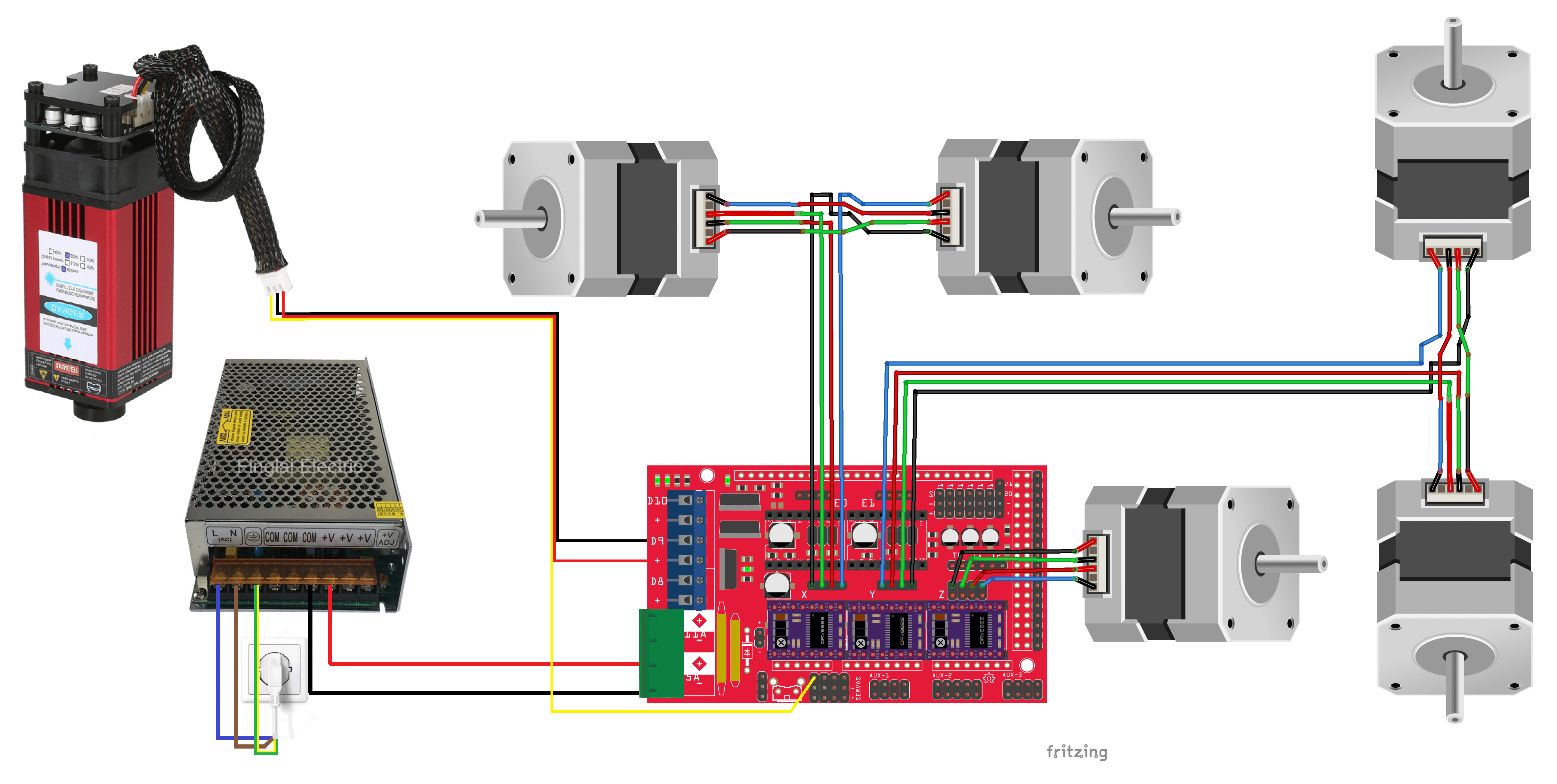
Branchement du Laser
Ceci est une étape qui peut varier car il dépend de l’outil que vous brancherez sur votre MPCNC. Vous pouvez y brancher une fraiseuse par exemple.
Ici, nous prendrons comme exemple le branchement du Laser 20W LD4070HA. On l’alimentera en 12V par la pin D9 et on contrôlera la puissance du laser par la Pin Digital 11 en PWM.
Voilà maintenant le câblage électrique terminé ! Pour la partie software et firmware, vous pouvez suivre ce tutoriel.
Sources :
- https://docs.v1e.com/electronics/ramps/
- https://docs.v1e.com/mpcnc/intro/
- https://docs.v1e.com/electronics/steppers/
- https://forum.v1e.com/t/stepper-motor-voltage/18573
- https://www.youtube.com/watch?v=89BHS9hfSUk
- http://voidmicro.com/Products/Laser/LD4070HA-en.html?page=page_laser


Et le câblage des sondes et des cellules chauffantes et de la ventilation de la tête ??
où est-ce ?????
Bonjour,
le sujet de cet article est le câblage d’une CNC pas d’une imprimante 3D.
Pour info, la sonde de tête, le ventilateur et la sonde du lit se branche sur les borniers D10, D9 et D8