
Installing Arduino IDE on Raspberry Pi
In this tutorial, we’ll look at how to install the Arduino IDE and CLI software on the Raspberry Pi and combine the strengths of both systems. Check your system configuration To know which version of the IDE to download and install, you need to know the...
Installing and wiring a Ramps 1.4 card for an MPCNC
An MPCNC is an acronym for “Mostly Printed CNC”, meaning that it is built primarily from 3D-printed parts. It is a CNC (Computer Numerical Control) machine that can perform machining, engraving, cutting or milling operations on various materials such as...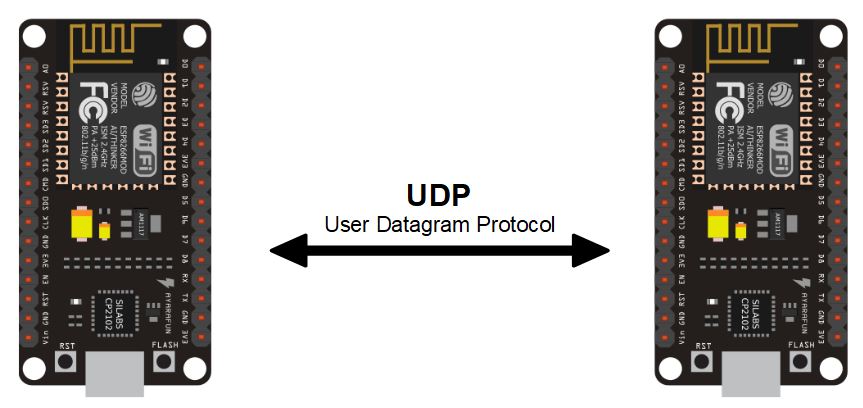
The different communication protocols
Whatever your electronics, programming or home automation project, you will certainly be using a communication protocol. Whether to program the microcontroller or to communicate with a sensor. This article presents various communication protocols commonly used on...
Arduino Due microcontroller overview
The Arduino Due is the first Arduino board based on a 32-Bit ARM microcontroller. It is therefore more powerful than the Arduino Mega. It has a high computing and memory capacity, and a large number of inputs. Microcontroller features The Arduino Due microcontroller...Products
-
 Robotic kit Quadrina Servo MG90S
208.33€
Robotic kit Quadrina Servo MG90S
208.33€
-
 STL file QuadrinaV1
1.50€
STL file QuadrinaV1
1.50€
-
 Robotic kit Rovy for DC Motor TTGM
137.50€
Robotic kit Rovy for DC Motor TTGM
137.50€
-
 Robotic kit WillySR Servo FS90R
100.00€
Robotic kit WillySR Servo FS90R
100.00€
License
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license