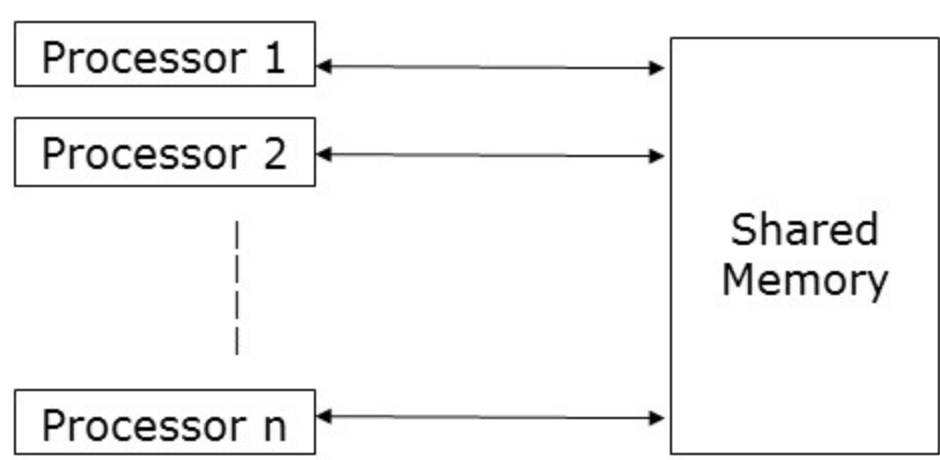
Utilisation de mémoire pour le partage de données en Python
L’utilisation de mémoire partagée, ou Shared memory, est une solution efficace pour échanger des données entre différents process d’une même application. Nous allons voir dans ce tutoriel l’utilisation de la librairie disponible en Python (qui existe...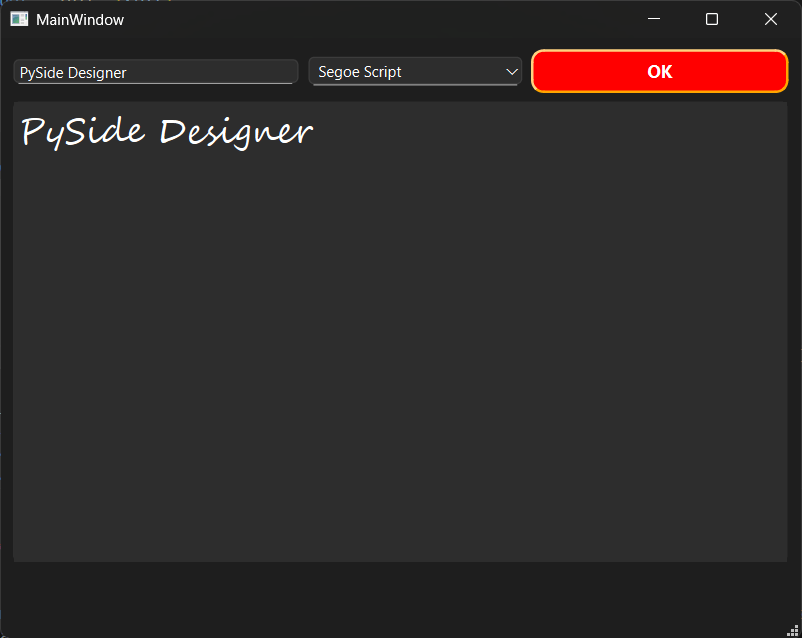
Créer un interface graphique avec Pyside Designer
Pour créer vos interface avec Qt sous Python, il existe un outil graphique Pyside Designer permettant de dessiner et définir des Interfaces Homme-Machine (IHM). Nous avons vu précédemment comment créer des interfaces graphique à l’aide de PySide et PyQT, nous...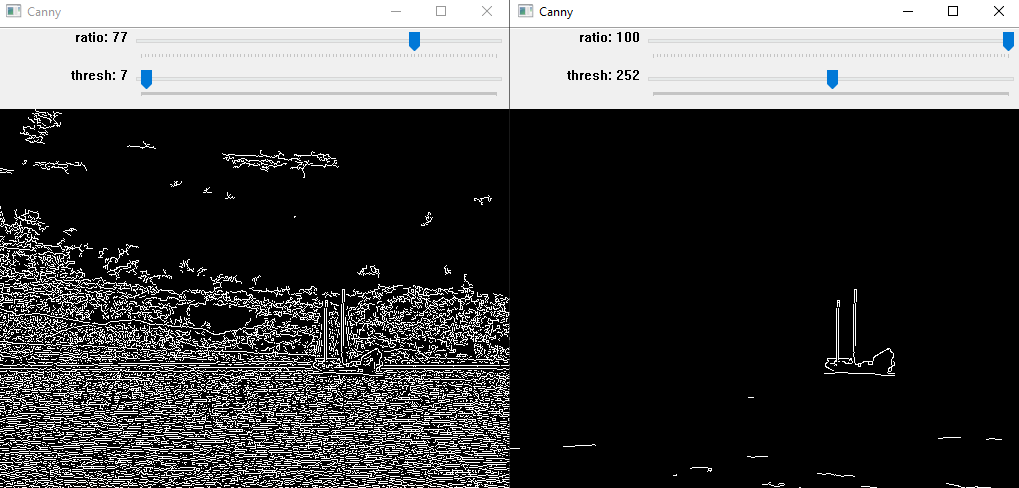
Détection de contour avec OpenCV et Python
Nous allons voir dans ce tutoriel comment implémenter un algorithme de détection de contour avec Python et OpenCV. La détection de contour est un exercice primordiale pour la vision assistée par ordinateur et la reconnaissance d’objet. Installation et...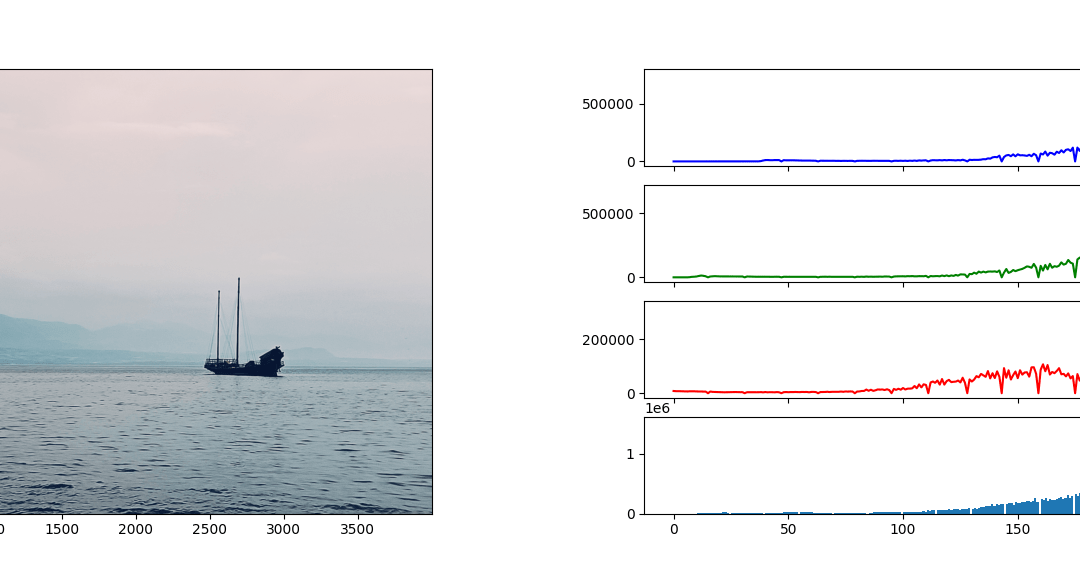
Traitement d’image avec OpenCV et Python
Le module open-source OpenCV est un outil puissant de traitement d’image contenant des algorithmes de vision par ordinateur. Ce module est codé nativement en C++ mais une API est disponible sur Python. On l’utilise pour le traitement d’image, photo...Produits

Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license