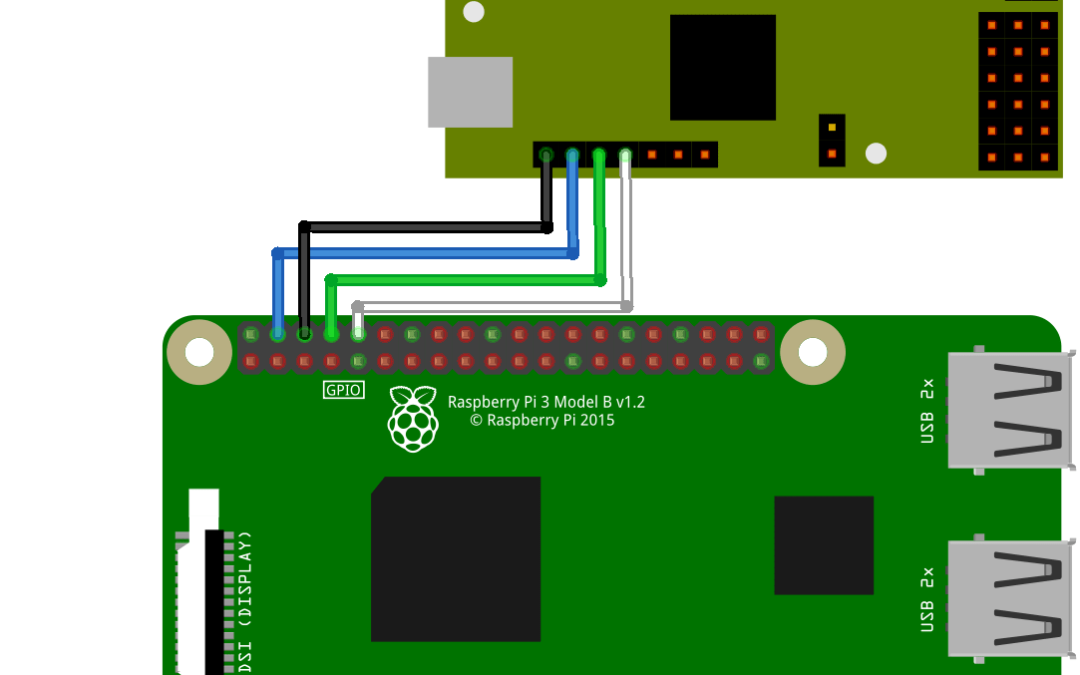
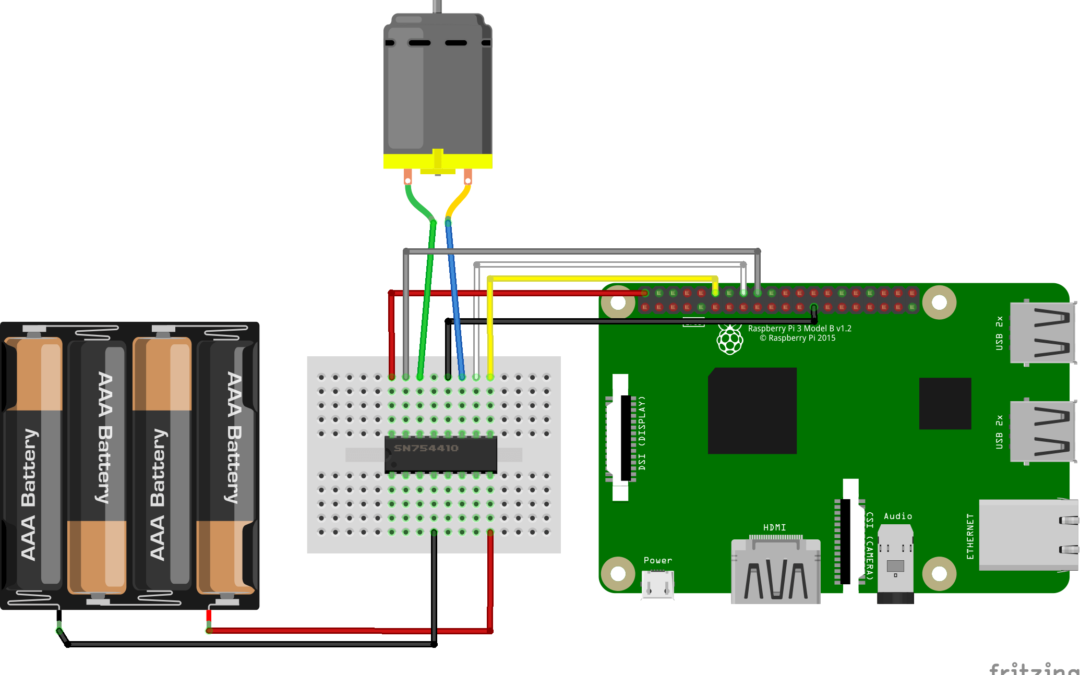
Pilotez un moteur CC avec Raspberry Pi
L’un des objectifs principaux de la robotique est d’articuler des objets. Pour se faire, il est très courant d’utiliser des moteurs électriques comme des moteurs à courant continu notamment pour les plateformes mobiles. Dans cet article, nous verrons comment...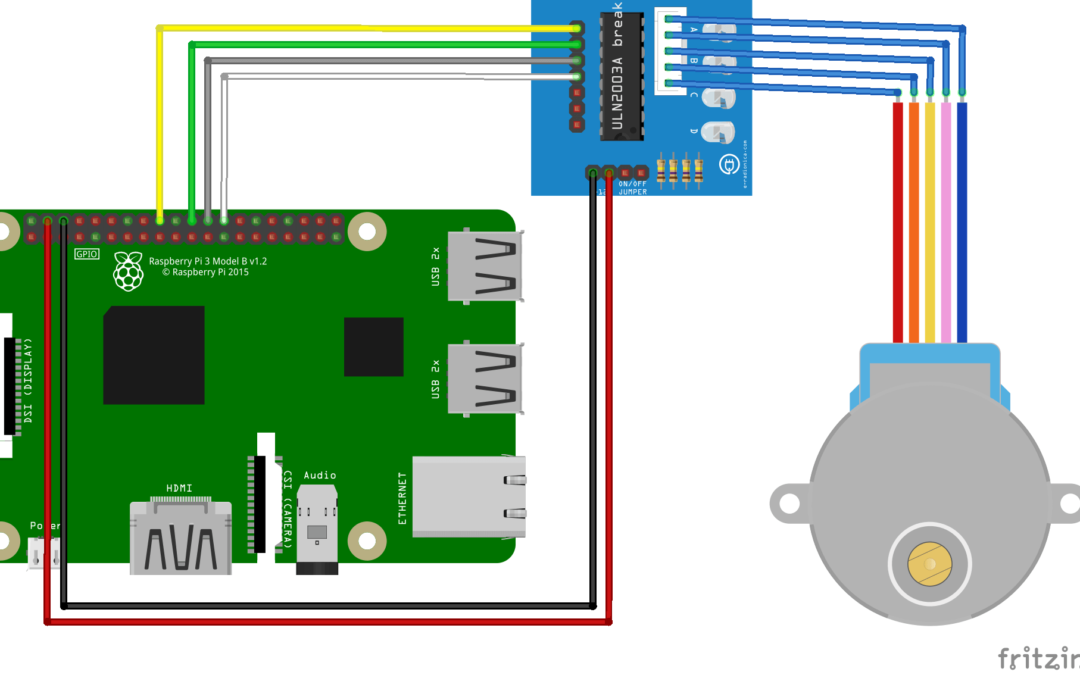
Pilotez un moteur pas-à-pas avec Raspberry Pi
Les moteurs pas-à-pas sont souvent utilisés lorsqu’une bonne précision est désirée en boucle ouverte notamment dans les systèmes de positionnement tels que les imprimantes 3D. Nous allons voir, dans cet article, comment programmer la carte Raspberry Pi pour...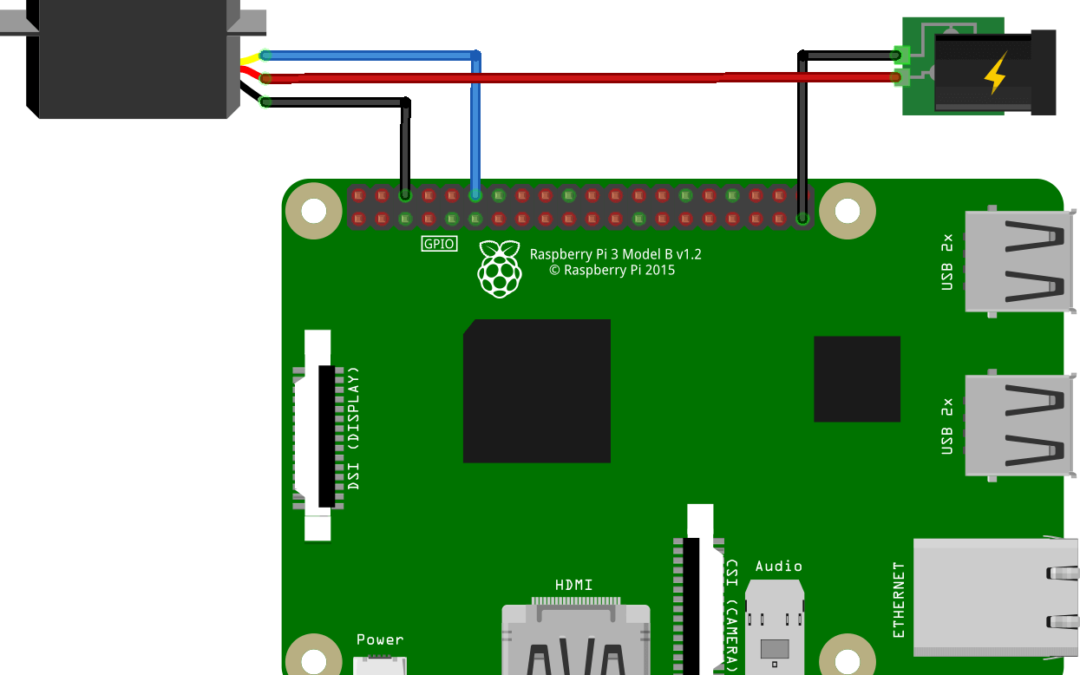
Pilotez un servomoteur avec Raspberry Pi
L’un des objectifs principaux de la robotique est d’articuler des objets. Pour se faire, il est très courant d’utiliser des moteurs électriques et plus particulièrement des servomoteurs. Nous allons voir dans cet article, comment programmer la carte Raspberry Pi...Programmez avec Raspberry Pi
La carte Raspberry PI est un microcontrôleur très puissant largement utilisé dans le rétrogaming ou comme serveur. Le Rapsberry Pi est un micro ordinateur très simple d’utilisation que nous allons découvrir dans ce tutoriel. Matériel OrdinateurÉcranHDMI...Produits
-
 Support moteur CC
Support moteur CC
-
 NodeMCU ESP32 (ESP-WROOM-32)
9,17€
NodeMCU ESP32 (ESP-WROOM-32)
9,17€
-
 Axe servomoteur
Gratuit
Axe servomoteur
Gratuit
-
 Robot en kit WillySR pour Servomoteur FS90R
100,00€
Robot en kit WillySR pour Servomoteur FS90R
100,00€
-
 AC DevShield ESP32
20,83€
AC DevShield ESP32
20,83€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license