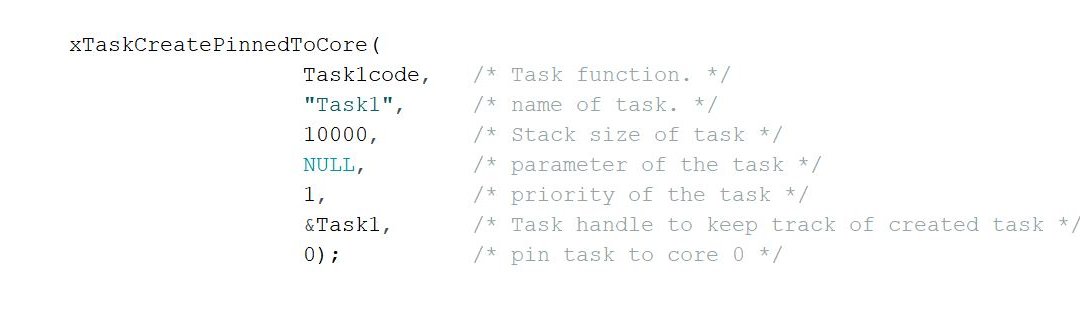
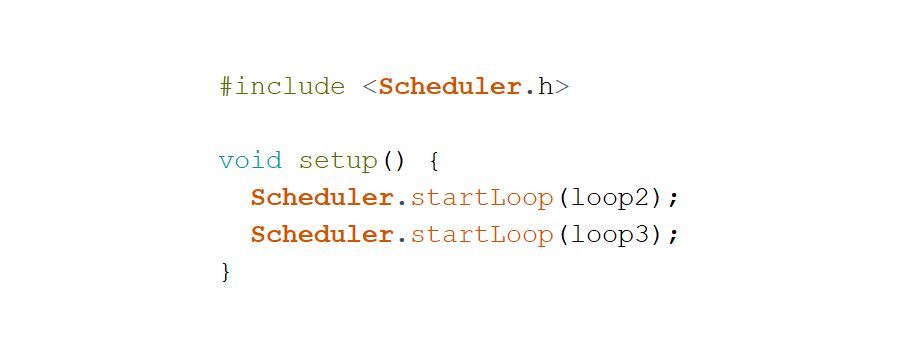
Programme multitâche avec Arduino Due et Scheduler
La carte Arduino Due permet de faire du multitasking à l’aide de la librairie Scheduler. Elle est basée sur un microcontrôleur ARM Cortex-M3 en 32 Bits avec 84MHz. Elle est donc bien plus puissante qu’un Arduino UNO. Ces caractéristiques lui permettent de...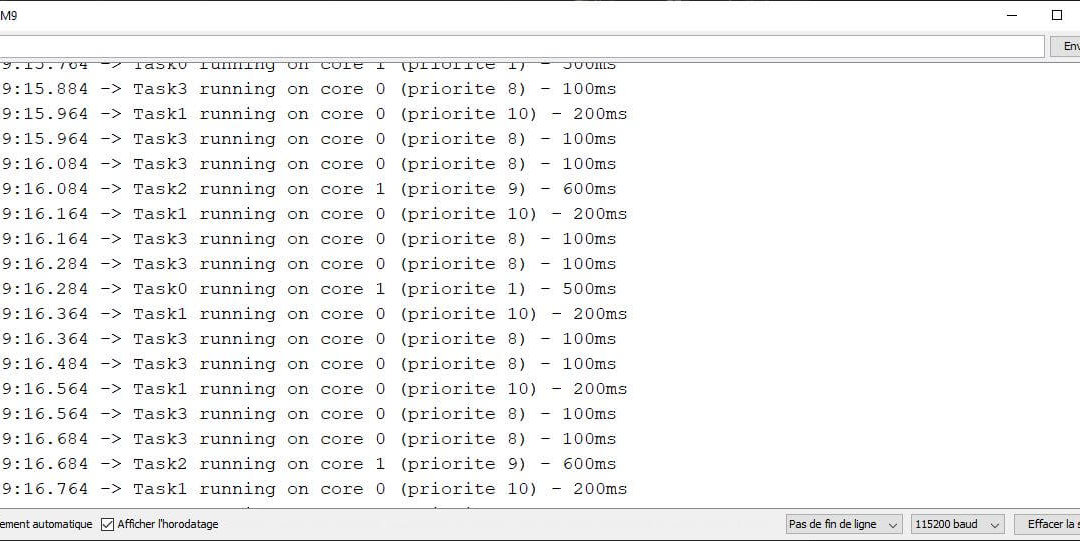
Faire du multitâche avec Arduino
Le multitâche ou multitasking est la capacité d’un microcontrôleur d’exécuter plusieurs tâches ou process sur le même horizon de temps. En pratique, un Arduino ne peut pas exécuter de tâches en parallèle mais il peut agencer et exécuter une partie des tâches les...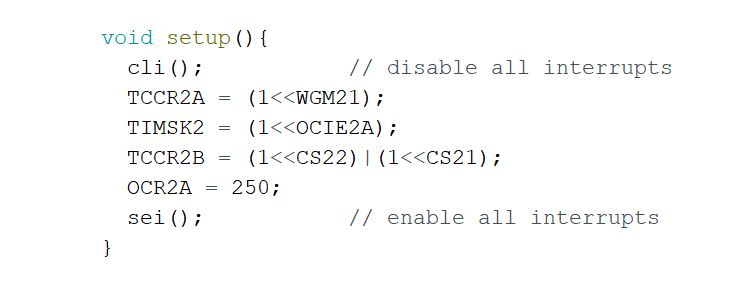
Utilisation des Timers de l’Arduino
L’utilisation des timers en Arduino est une méthode avancées permettant d’exécuter du code sans perturber le reste du programme. Ils permettent notamment d’activer des fonctions à des intervalles de temps précis. Les timers sont utilisées dans bon...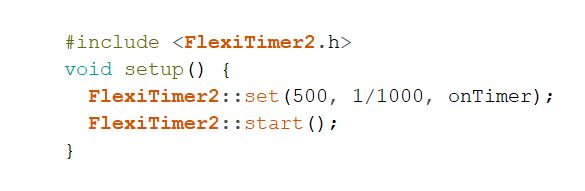
Programme multitâche avec Arduino et la librairie FlexiTimer2
La librairie Arduino FlexiTimer2 est une librairie qui permet d’activer des fonctions à des intervalles de temps réguliers. Elle permet, à ce titre, de faire des programmes multitâche (ou multitasking) avec des microcontrôleurs Arduino. Cette méthode est utile...Produits



Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license