Creación de una barrera automática
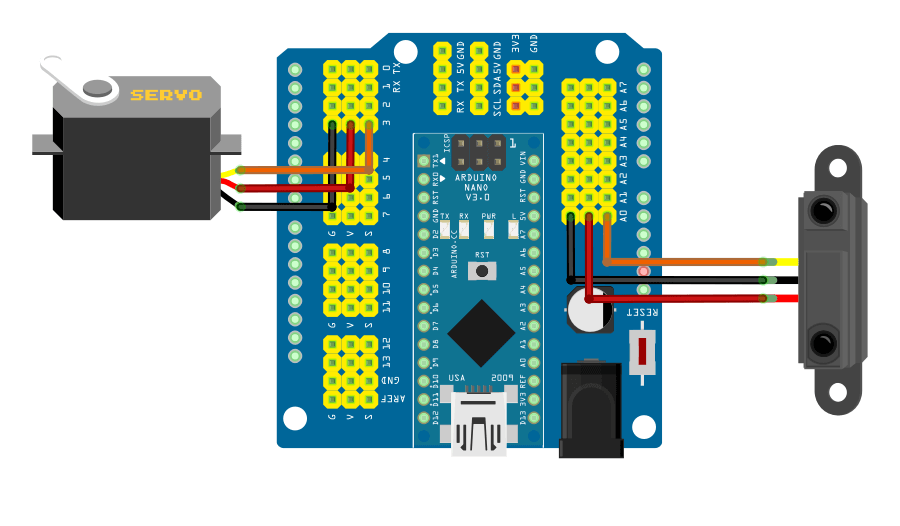
En este proyecto, vamos a crear una barrera automática utilizando un sensor de infrarrojos y un servomotor controlado por Arduino. Objetivo Utilizando un programa Arduino, vamos a hacer que la barrera automática suba cuando pase un objeto y baje cuando el paso esté...
Uso de un interruptor basculante con Arduino
Un interruptor de inclinación sirve para detectar la orientación o inclinación de un sistema. Suele utilizarse para indicar si un sistema (como un vehículo agrícola) está fuera de su rango de inclinación operativo, o para detectar la orientación de una pantalla y...
Uso de un sensor de nivel de agua con Arduino
El sensor de nivel de agua está diseñado para detectar el agua, puede ser ampliamente utilizado para detectar la precipitación, el nivel de agua en una cavidad, o incluso la fuga de líquido. El sensor se compone principalmente de tres partes: un conector electrónico,...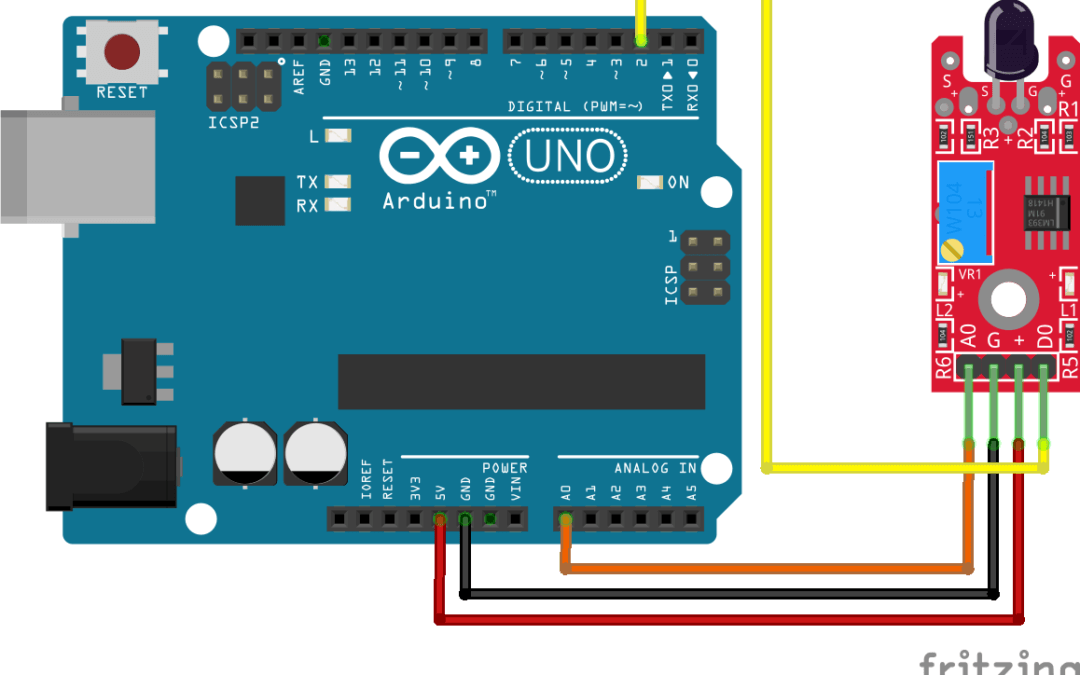
Uso de un sensor de llama con Arduino
El módulo sensor de llama KY-026 permite la detección de llamas mediante un receptor de infrarrojos que captará las emisiones de luz de las fuentes de calor. Este tutorial es aplicable a todas las placas compatibles con Arduino. Material OrdenadorArduino UNOCable USB...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license