Programmer un ESP32 avec VSCode et ESP-IDF
Dans ce tutoriel, nous allons voir comment programmer un ESP32 à l’aide de l’environnement ESP-IDF avec VSCode. ESP-IDF ou Espressif IoT Development Framework, est l’environnement officiel de programmation des ESP32 et permet la programmation...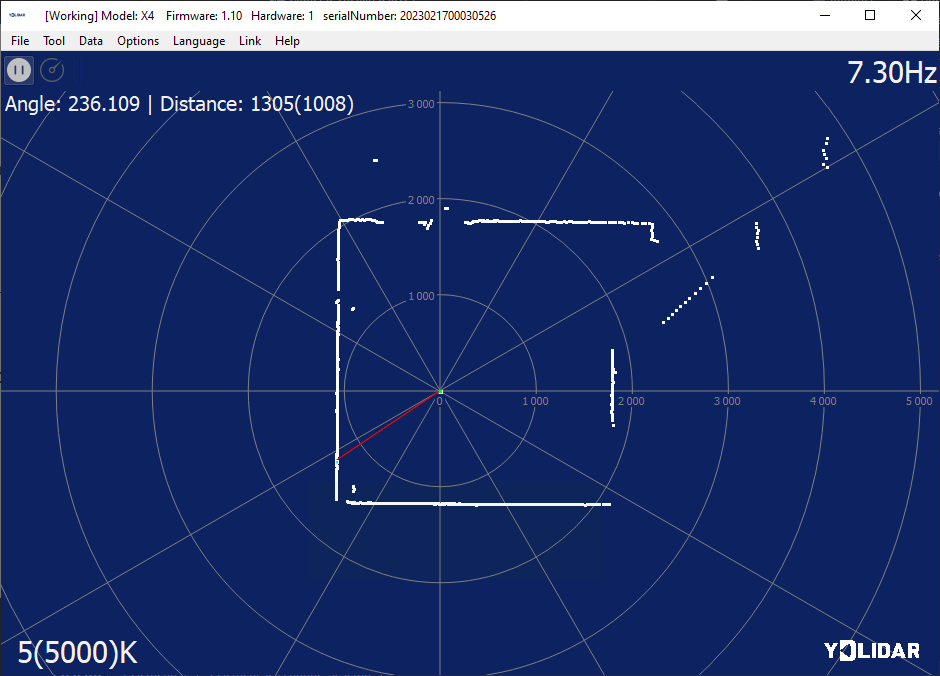
Utilisation d’un capteur Lidar avec Python
Nous allons voir dans ce tutoriel comment mettre en place une cartographie avec un capteur Lidar sous Python. Le capteur lidar permet de se repérer dans l’espace et de cartographier. Description du capteur Lidar Le capteur lidar YLidarX4 est un capteur laser de...Configuration de RetroPie sur Raspberry Pi
Le microordinateur Raspberry Pi a différentes utilisations courantes dont le retro-gaming avec RetroPie. Nous allons voir dans ce tutoriels, comment installer, configurer et utiliser RetroPie sur un Raspberry Pi Matériel Raspberry Pi 4 ou autre carte compatibles...
Gestion du BLE sur un ESP32 avec MicroPython
Dans ce tutoriel, nous allons apprendre comment gérer et tester la communication BLE (Bluetooth Low Energy) sur un ESP32 avec MicroPython. Matériels Un module ESP32 Un ordinateur avec Python installé Câble USB pour la connexion ESP32-ordinateur Un appareil Android...
Installer Arduino IDE sur Raspberry Pi
Nous allons voir dans ce tutoriel comment installer le logiciel Arduino IDE et CLI sur Raspberry Pi et ainsi combiner les forces des deux systèmes. Vérifier la configuration de votre système Pour savoir quelle version de l’IDE télécharger et installer, vous...
Créer un Web Crawler avec Python
Pour récolter des données sur internet, il est possible de créer un Web crawler ou Web scraping avec Python. Un robot d’exploration du Web est un outil qui permet d’extraire des données d’une ou plusieurs pages Web. Configuration de...
Créer une application de bureau avec Electron
Nous allons voir dans ce tutoriel comment créer une application de bureau avec le framework Electron. Cet environnement de programmation permet de développer des IHM à l’aide des langages Web JavaScript, HTML et CSS compatible sur plusieurs OS. Mise en place de...
Utilisation des WebSockets avec React Native
Lire et écrire un fichier avec React Native
Produits

Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license