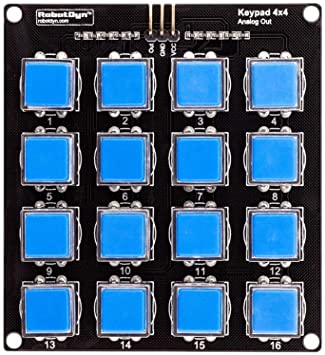
Gérer un Clavier 4×4 Analogique avec Arduino
Que ce soit une calculatrice ou le digicode d’un immeuble, nous nous servons couramment des claviers numériques. Le clavier numérique 4×4 est une matrice de 16 boutons dont les états peuvent être détectés par un microcontrôleur. Ce module nécessite une...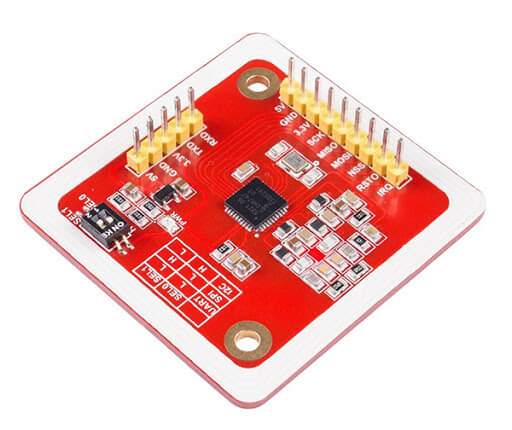
Utilisation du lecteur RFID PN532 avec Arduino
Le module NFC PN532 est un lecteur de carte à puce qui, permet entre autre, d’activer un mécanisme lorsque la bonne carte est présentée au lecteur. On peut le retrouver dans les smartphones, par exemple. Le module RC522 est certainement le module RFID le plus...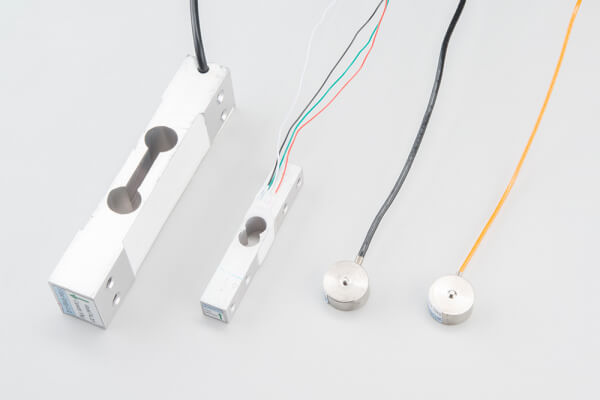
Mesure de force avec Arduino et le module HX711
Il existe des capteurs de force assez simple d’utilisation et compatible avec les microcontrôleurs comme Arduino. Ils se composent d’une cellule d’effort et d’un module de conversion. La cellule d’effort est un capteur à jauge de...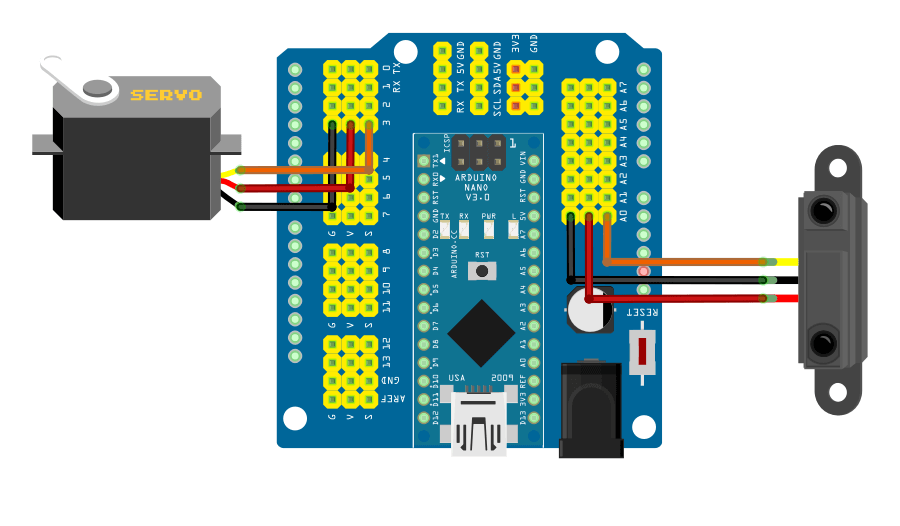
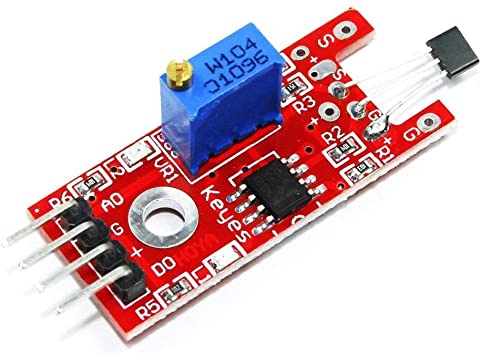
Réalisation d’une barrière automatique
Dans ce projet, nous allons réaliser un barrière automatique à l’aide d’un capteur infrarouge et d’un servomoteur qui seront gérés par Arduino. Objectif A l’aide d’un programme Arduino, nous allons faire en sorte que la barrière...Produits


Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license