Communication entre deux programmes C via sockets
Les sockets sont un outil puissant en programmation C afin d’échanger des données entre différentes application. Les socket peuvent être utilisé avec différents langage de programmation. Dans ce tutoriel, nous allons créer deux programmes qui communique à...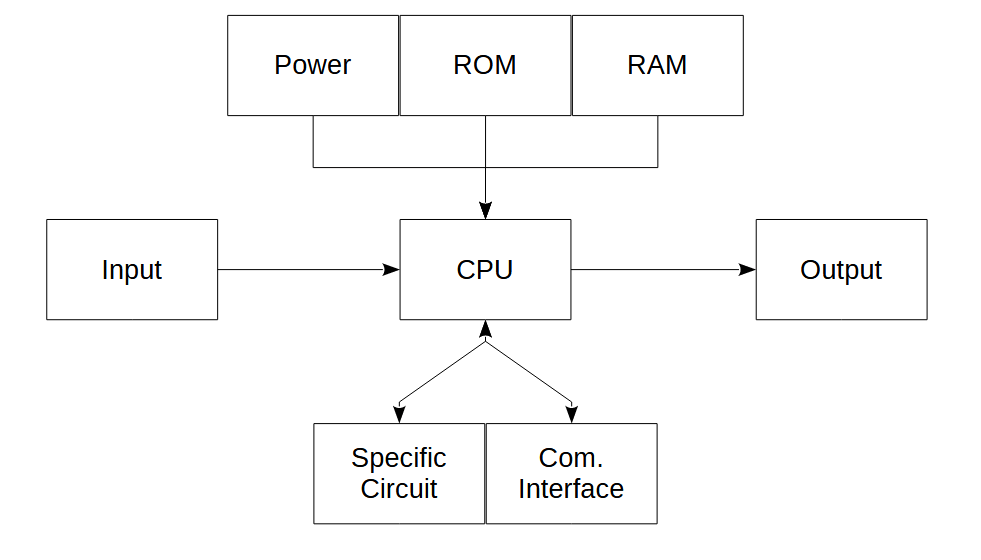
Coder un Arduino en C embarqué
Partage de données entre deux programmes via JSON
Il est possible d’échanger des données entre deux programmes via du texte au format JSON. Lorsqu’un système utilise différents processus, il est intéressant de pouvoir échanger des données entre tâches. Une méthode possible est d’utiliser un texte dans un...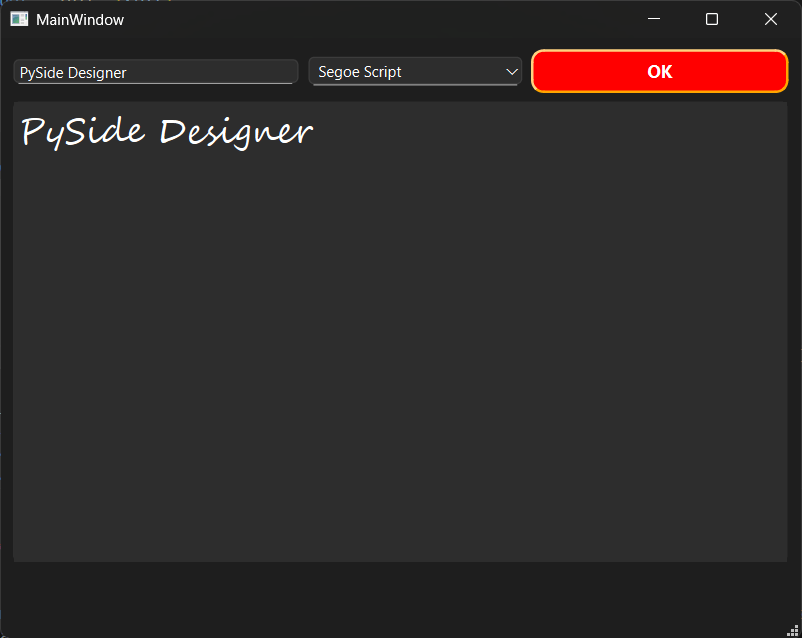
Créer un interface graphique avec Pyside Designer
Pour créer vos interface avec Qt sous Python, il existe un outil graphique Pyside Designer permettant de dessiner et définir des Interfaces Homme-Machine (IHM). Nous avons vu précédemment comment créer des interfaces graphique à l’aide de PySide et PyQT, nous...Produits
-
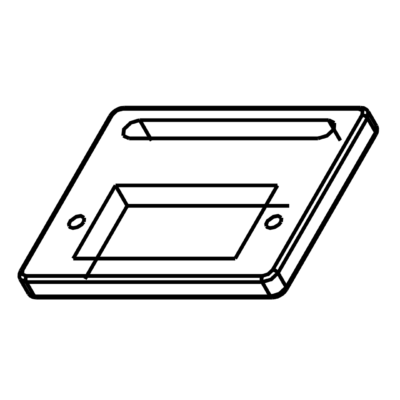 Support servomoteur
Gratuit
Support servomoteur
Gratuit
-
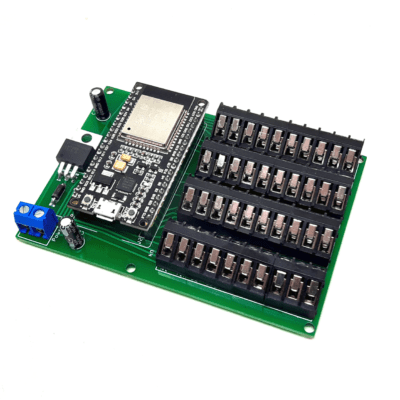 AC BreakoutShield ESP32
13,33€
AC BreakoutShield ESP32
13,33€
-
 NodeMCU ESP8266 V2 (Amica)
6,67€
NodeMCU ESP8266 V2 (Amica)
6,67€
-
 Grove I/O Base Shield
5,33€
Grove I/O Base Shield
5,33€
-
 Support capteur V1
Gratuit
Support capteur V1
Gratuit
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license