Neste tutorial, veremos como realizar o reconhecimento de objetos com Python usando uma rede neural pré-treinada usando aprendizado profundo.
Vimos num tutorial anterior como reconhecer formas simples utilizando a visão por computador. Este método só funciona para certas formas simples predefinidas. Se quiser reconhecer uma maior variedade de objectos, a forma mais fácil é utilizar a inteligência artificial.
Hardware
- Um computador com uma instalação Python3
- Uma câmara
Princípio
A inteligência artificial é um domínio da informática em que o próprio programa aprende a realizar determinadas tarefas. O reconhecimento visual, em particular. Neste tutorial, vamos utilizar uma rede neural treinada para reconhecer formas específicas.
São necessários muitos dados para poder treinar corretamente uma rede neural. Foi demonstrado que a aprendizagem é mais rápida numa rede neuronal treinada para outra coisa. Por exemplo, uma rede neuronal treinada para reconhecer cães será treinada mais facilmente para reconhecer gatos.
Configurar o Python
Caso contrário, pode descarregar e instalar o Python 3
Pode então instalar as bibliotecas OpenCV, numpy e imutils necessárias.
pip3 install opencv-python numpy imutilsou
python3 -m pip install opencv-python numpy imutils- ficheiro prototxt : https://github.com/nikmart/pi-object-detection/blob/master/MobileNetSSD_deploy.prototxt.txt
- ficheiro caffemodel : https://github.com/nikmart/pi-object-detection/blob/master/MobileNetSSD_deploy.caffemodel
Coloque os ficheiros do modelo numa pasta e crie o ficheiro ObjectRecognition.py

Script Python para reconhecimento de objectos
Em primeiro lugar, criamos um fluxo de vídeo (vs) utilizando a biblioteca imutils, que irá obter as imagens da câmara.
vs = VideoStream(src=0, resolution=(1600, 1200)).start()Inicializamos uma rede neural com os parâmetros da ModelNet-SSD (net) utilizando a biblioteca OpenCV.
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])Em seguida, criaremos um ciclo que, em cada iteração, lerá a imagem da câmara e passá-la-á para a entrada da rede neural para deteção e reconhecimento de objectos.
while True:
# Get video stream. max width 800 pixels
frame = vs.read()
blob = cv2.dnn.blobFromImage(cv2.resize(frame, (300, 300)), 0.007843, (300, 300), 127.5)
# Feed input to neural network
net.setInput(blob)
detections = net.forward()Por fim, o código apresenta a caixa de deteção e a probabilidade de reconhecimento na imagem.
label = "{}: {:.2f}%".format(CLASSES[idx],confidence * 100)
cv2.rectangle(frame, (startX, startY), (endX, endY),COLORS[idx], 2)
y = startY - 15 if startY - 15 > 15 else startY + 15
cv2.putText(frame, label, (startX, y),cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2)#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# ObjectRecognition.py
# Description:
# Use ModelNet-SSD model to detect objects
#
# www.aranacorp.com
# import packages
import sys
from imutils.video import VideoStream
from imutils.video import FPS
import numpy as np
import argparse
import imutils
import time
import cv2
# Arguments construction
if len(sys.argv)==1:
args={
"prototxt":"MobileNetSSD_deploy.prototxt.txt",
"model":"MobileNetSSD_deploy.caffemodel",
"confidence":0.2,
}
else:
#lancement à partir du terminal
#python3 ObjectRecognition.py --prototxt MobileNetSSD_deploy.prototxt.txt --model MobileNetSSD_deploy.caffemodel
ap = argparse.ArgumentParser()
ap.add_argument("-p", "--prototxt", required=True,
help="path to Caffe 'deploy' prototxt file")
ap.add_argument("-m", "--model", required=True,
help="path to Caffe pre-trained model")
ap.add_argument("-c", "--confidence", type=float, default=0.2,
help="minimum probability to filter weak detections")
args = vars(ap.parse_args())
# ModelNet SSD Object list init
CLASSES = ["arriere-plan", "avion", "velo", "oiseau", "bateau",
"bouteille", "autobus", "voiture", "chat", "chaise", "vache", "table",
"chien", "cheval", "moto", "personne", "plante en pot", "mouton",
"sofa", "train", "moniteur"]
COLORS = np.random.uniform(0, 255, size=(len(CLASSES), 3))
# Load model file
print("Load Neural Network...")
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])
if __name__ == '__main__':
# Camera initialisation
print("Start Camera...")
vs = VideoStream(src=0, resolution=(1600, 1200)).start()
#vs = VideoStream(usePiCamera=True, resolution=(1600, 1200)).start()
#vc = cv2.VideoCapture('./img/Splash - 23011.mp4') #from video
time.sleep(2.0)
fps = FPS().start()
#Main loop
while True:
# Get video sttream. max width 800 pixels
frame = vs.read()
#frame= cv2.imread('./img/two-boats.jpg') #from image file
#ret, frame=vc.read() #from video or ip cam
frame = imutils.resize(frame, width=800)
# Create blob from image
(h, w) = frame.shape[:2]
blob = cv2.dnn.blobFromImage(cv2.resize(frame, (300, 300)), 0.007843, (300, 300), 127.5)
# Feed input to neural network
net.setInput(blob)
detections = net.forward()
# Detection loop
for i in np.arange(0, detections.shape[2]):
# Compute Object detection probability
confidence = detections[0, 0, i, 2]
# Suppress low probability
if confidence > args["confidence"]:
# Get index and position of detected object
idx = int(detections[0, 0, i, 1])
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h])
(startX, startY, endX, endY) = box.astype("int")
# Create box and label
label = "{}: {:.2f}%".format(CLASSES[idx],
confidence * 100)
cv2.rectangle(frame, (startX, startY), (endX, endY),
COLORS[idx], 2)
y = startY - 15 if startY - 15 > 15 else startY + 15
cv2.putText(frame, label, (startX, y),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2)
# enregistrement de l'image détectée
cv2.imwrite("detection.png", frame)
# Show video frame
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# Exit script with letter q
if key == ord("q"):
break
# FPS update
fps.update()
# Stops fps and display info
fps.stop()
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
cv2.destroyAllWindows()
vs.stop()
vc.release()
Fontes de imagem para deteção de objectos
Pode utilizar este script com diferentes fontes de imagem. Para tal, é necessário adaptar ligeiramente o código anterior para modificar a variável “frame” que contém a imagem a analisar.
- A câmara Web do seu computador
vs = VideoStream(src=0, resolution=(1600, 1200)).start() while True: frame = vs.read()
- Uma câmara IP
vc = cv2.VideoCapture('rtsp://user:password@ipaddress:rtspPort')
while True:
ret, frame=vc.read() #from ip cam
- O Raspberry Pi Picam
vs = VideoStream(usePiCamera=True, resolution=(1600, 1200)).start() while True: frame = vs.read()
- Um ficheiro de vídeo
vc = cv2.VideoCapture('./img/Splash - 23011.mp4') #from video
while True:
ret, frame=vc.read() #from video
- Um ficheiro de imagem
frame= cv2.imread('./img/two-boats.jpg')
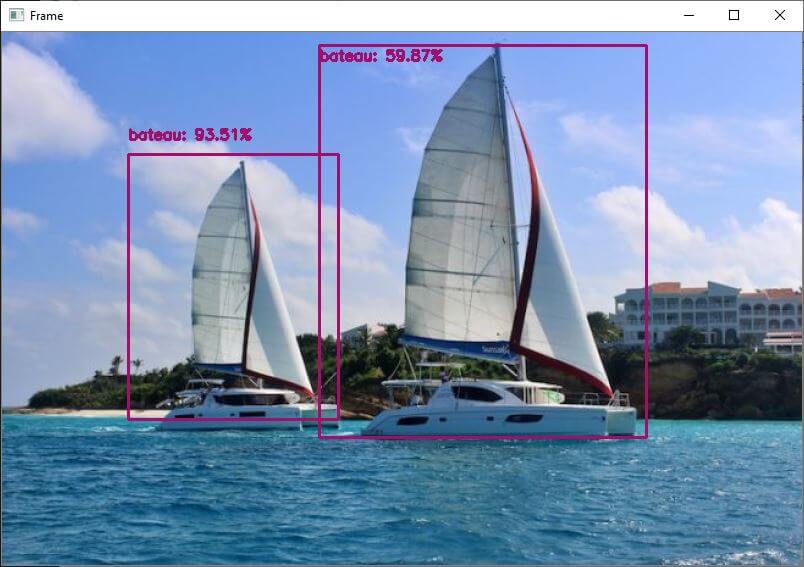
Resultados
Para este exemplo, enviamos uma imagem de dois barcos como entrada para a rede neural, que são corretamente reconhecidos. Para obter resultados ligeiramente diferentes, pode modificar o parâmetro de confiança para evitar falsos positivos.
Pode testar este código com a sua webcam ou com fotografias, por exemplo, para ver o desempenho do modelo e do reconhecimento de objectos.
Pacotes e modelos
Neste tutorial, utilizámos o modelo ModelNet-SSD pré-treinado. Vale a pena notar que existem outros modelos de reconhecimento, como o Coco, e outras bibliotecas de reconhecimento visual, como a ImageIA.
Não hesite em deixar-nos um comentário para partilhar as ferramentas que utiliza ou de que tem conhecimento.