
Controlar um controlador serial Maestro com Arduino
Quando se pretende controlar vários servomotores e são necessárias muitas entradas/saídas livres para operar o seu robô (para controlar o Hexana, por exemplo), é interessante usar um controlador serial de servomotor, como o Mini Maestro da Pololu. Pré-requisitos:...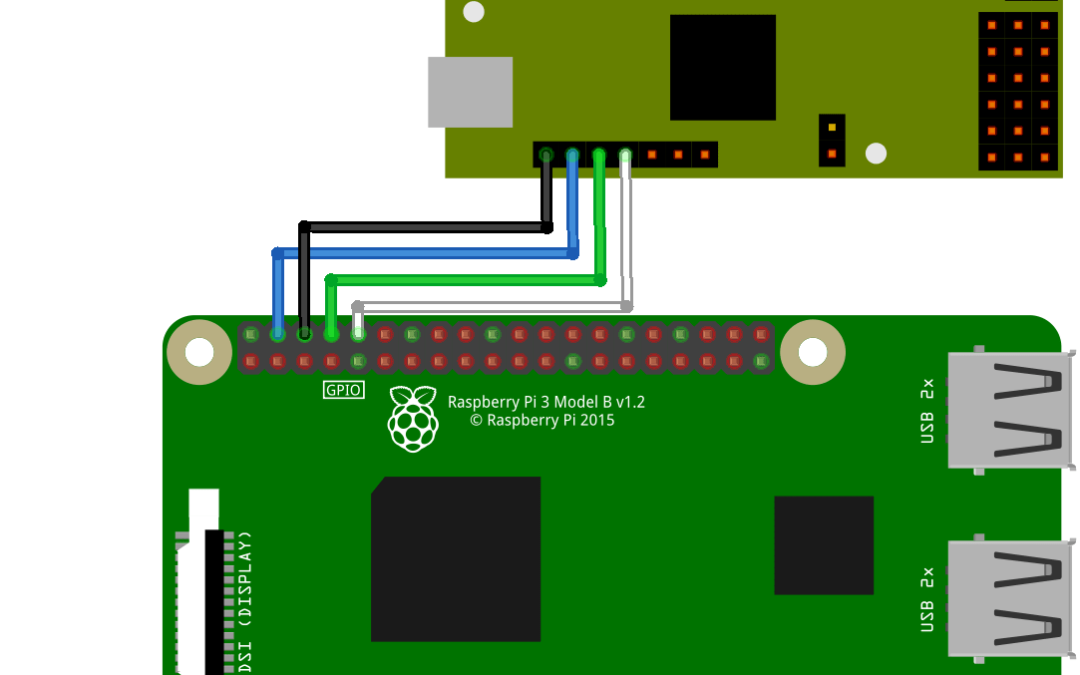
Controlar um controlador serial Maestro com Raspberry Pi
Quando se pretende controlar vários servomotores e são necessárias muitas entradas/saídas livres para operar o seu robô (para controlar o Hexana, por exemplo), é interessante usar um controlador serial para servomotor, como o Mini Maestro da Pololu.. Este tutorial...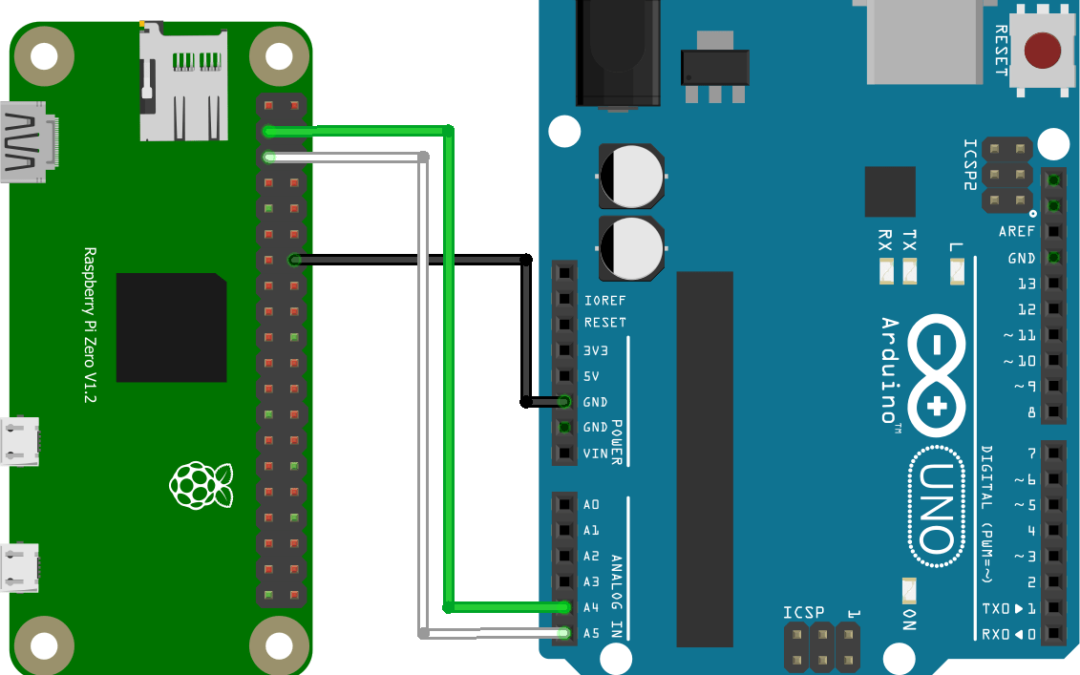
Comunicação I2C entre Raspberry Pi e Arduino
Em alguns projetos, pode ser interessante estabelecer uma comunicação I2C entre Raspberry Pi e Arduino. A potência de computação e as capacidades sem fios do Raspberry Pi, aliadas à capacidade de entrada e saída do Arduino, resultam num sistema de controle completo...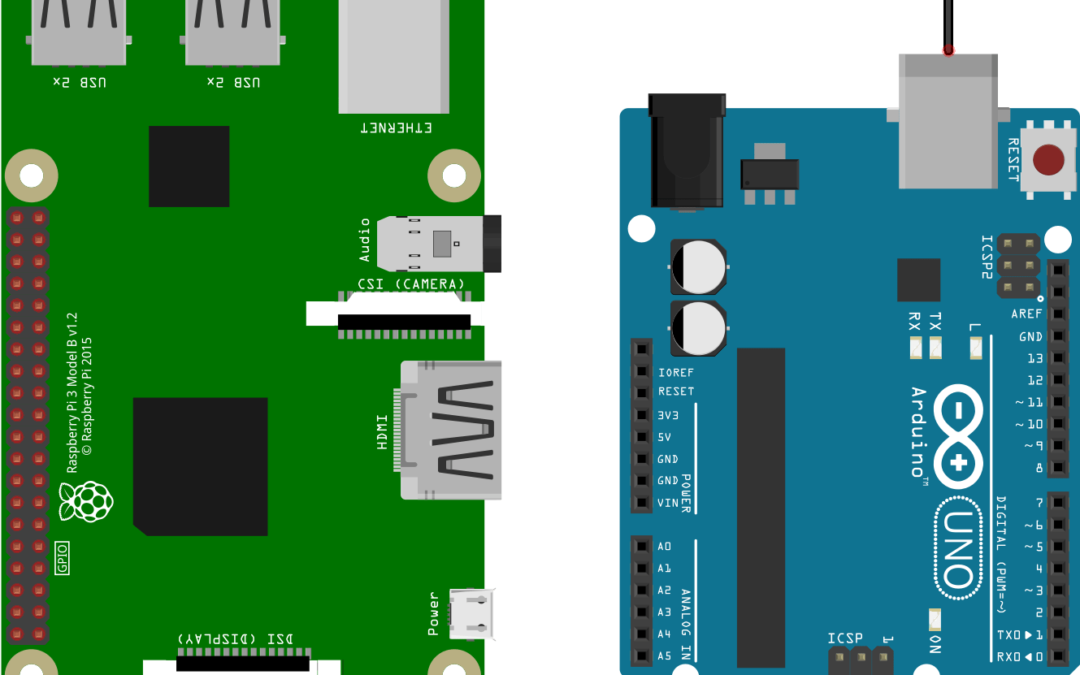
Comunicação serial entre Raspberry Pi e Arduino
Em alguns projetos, pode ser interessante estabelecer uma comunicação serial entre o Raspberry Pi e o Arduino. Com isso, aliamos a capacidade de processamento e a interface sem fios do Raspberry Pi com as entradas e saídas e a coleção de módulos do Arduino. O primeiro...License
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license