

Reproducir el funcionamiento de un semáforo
Para este proyecto, vamos a construir un semáforo y a reproducir su funcionamiento. Veremos paso a paso cómo probar cada componente y desarrollar el programa final. Este es un proyecto sencillo para empezar a aprender electrónica y programación con Arduino. Hardware...
Creación de un controlador MIDI con Arduino
En este proyecto vamos a construir una caja MIDI para poder probar los instrumentos del sintetizador CoolSoft y tocar algunas notas. Vamos a utilizar tres sensores para modificar los mensajes MIDI. Eres libre de añadir elementos para hacer un controlador MIDI más...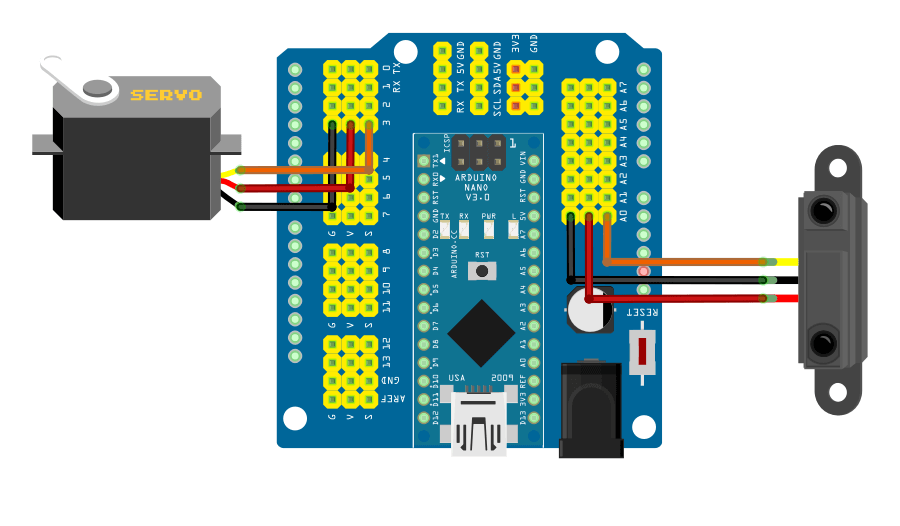
Creación de una barrera automática
En este proyecto, vamos a crear una barrera automática utilizando un sensor de infrarrojos y un servomotor controlado por Arduino. Objetivo Utilizando un programa Arduino, vamos a hacer que la barrera automática suba cuando pase un objeto y baje cuando el paso esté...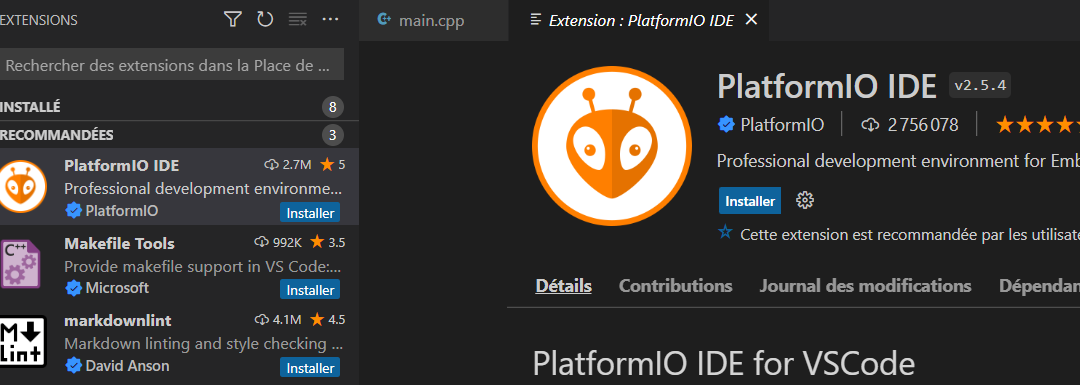
Instalar PlatformIO IDE en Visual Studio Code
En este tutorial vamos a configurar Visual Studio Code para que pueda ejecutar C Hardware Ordenador Placa Arduino UNO u otra Cable USB para conectar la placa Arduino al PC Instalación de Visual Studio Code y PlatformIO IDE Siga los pasos de instalación para descargar...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license