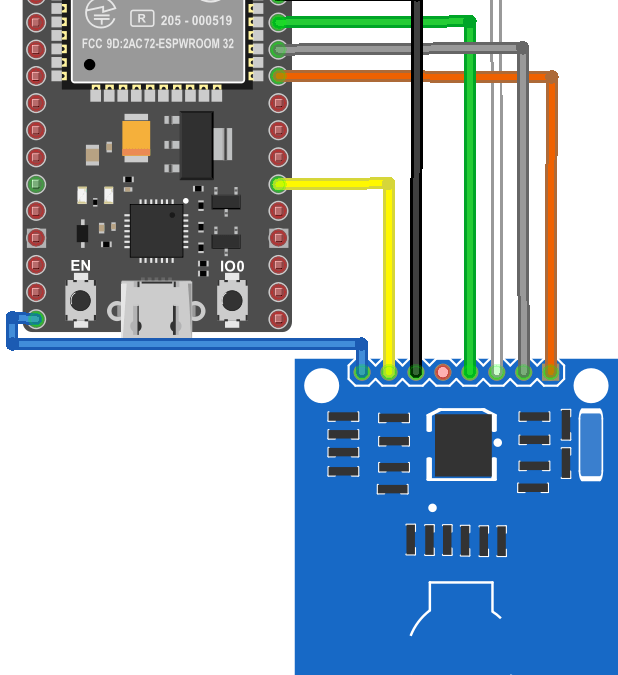
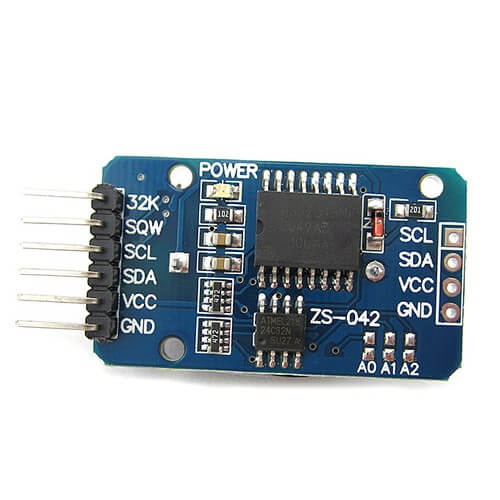
Usando un módulo DS3231 con Arduino
Cada computadora está equipada con un reloj interno de tiempo real que le permite conocer la fecha. Los microcontroladores tipo Arduino no tienen RTC. El módulo DS3231 le da al Arduino la capacidad de calcular la fecha, permitiéndole controlar el tiempo con más...
Usando un sensor PIR con Arduino
Es posible activar un sistema, como una alarma, detectando la presencia de una persona mediante un sensor de movimiento PIR. En la automatización del hogar, es una práctica común activar los dispositivos cuando una persona entra en una habitación. Esto es posible...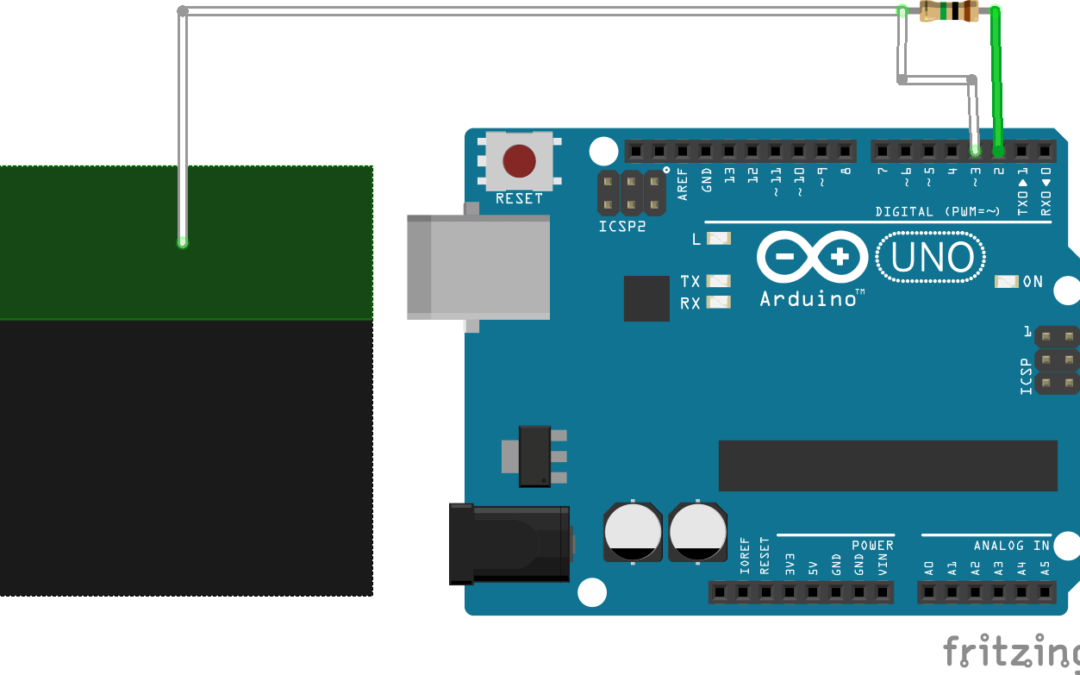
Creando un sensor capacitivo con Arduino
Los sensores capacitivos se utilizan comúnmente para la detección de objetos. Pueden utilizarse, por ejemplo, para detectar el paso de un objeto en una cinta transportadora o para detectar el nivel de un líquido en un tanque. Más cerca de casa, los sensores...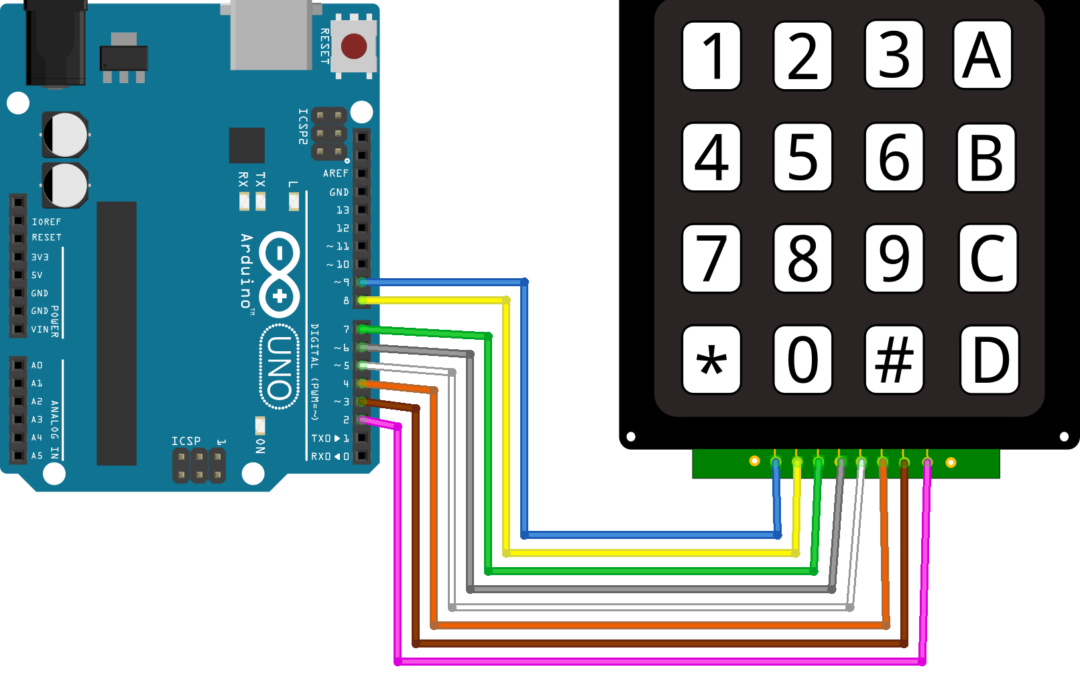
Usando un teclado digital 4×4 con Arduino
Ya sea una calculadora o el teclado de un edificio, usamos rutinariamente teclados numéricos. El teclado digital 4×4 es una matriz de 16 botones cuyos estados pueden ser detectados por un microcontrolador. Hardware ComputadoraArduino UNOCable USB A macho a B...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license