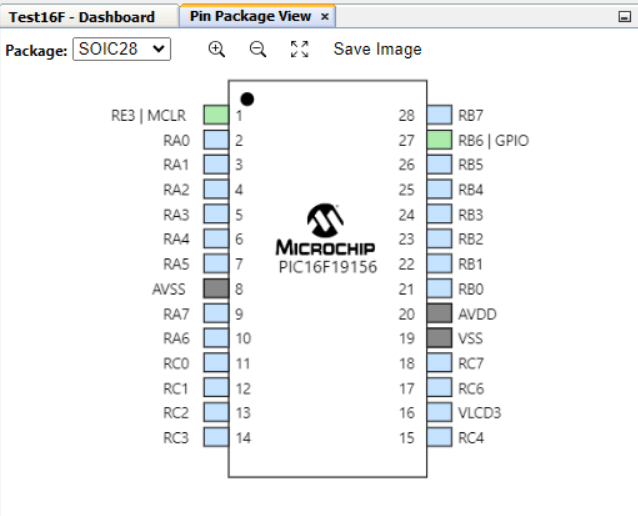
Programmer un microcontrôleur PIC avec MPLAB
Les microcontrôleur PIC sont des composants simples, économiques de taille et de performance variées, idéal pour des systèmes embarqués optimisés. Nous allons voir dans ce tutoriel comment les programmer avec la suite logiciel MPLAB. Matériel Ordinateur PicKit4 ou 5...Programmer une interface graphique GTK en C
Il est possible de créer des interfaces graphique en langage C avec le paquet GTK. Nous allons voir dans ce tutoriel comment installer GTK et comment coder une interface graphique simple. Installation de GTK Téléchargez et installez MSYS2 et ouvrez un terminal Puis...Communication entre deux programmes C via sockets
Les sockets sont un outil puissant en programmation C afin d’échanger des données entre différentes application. Les socket peuvent être utilisé avec différents langage de programmation. Dans ce tutoriel, nous allons créer deux programmes qui communique à...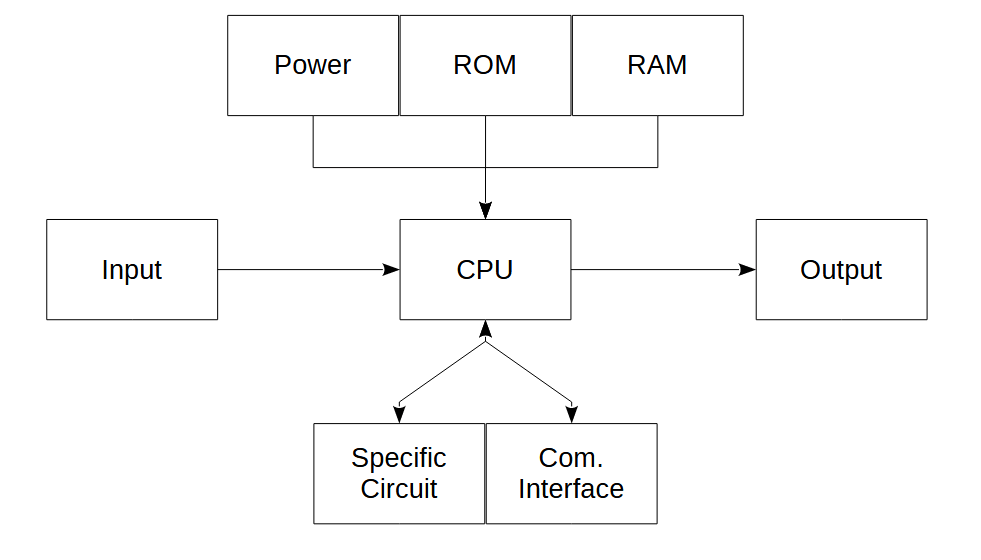
Coder un Arduino en C embarqué
Partage de données entre deux programmes via JSON
Il est possible d’échanger des données entre deux programmes via du texte au format JSON. Lorsqu’un système utilise différents processus, il est intéressant de pouvoir échanger des données entre tâches. Une méthode possible est d’utiliser un texte dans un...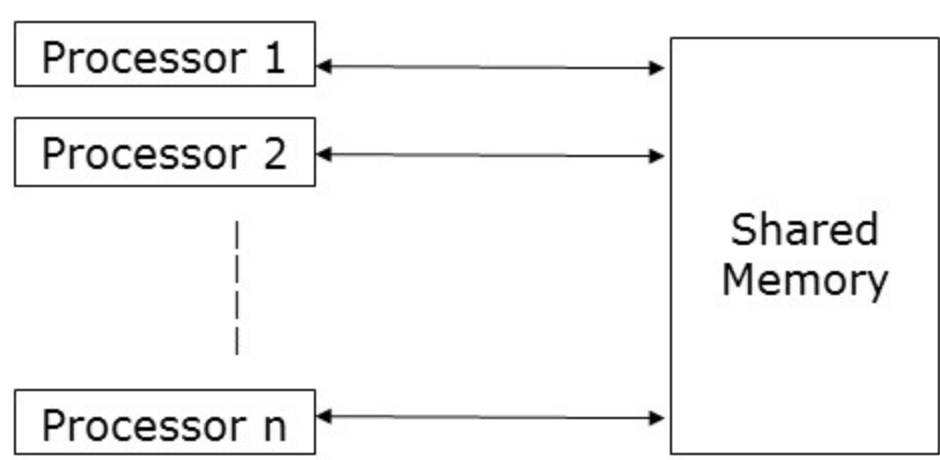
Utilisation de mémoire pour le partage de données en Python
L’utilisation de mémoire partagée, ou Shared memory, est une solution efficace pour échanger des données entre différents process d’une même application. Nous allons voir dans ce tutoriel l’utilisation de la librairie disponible en Python (qui existe...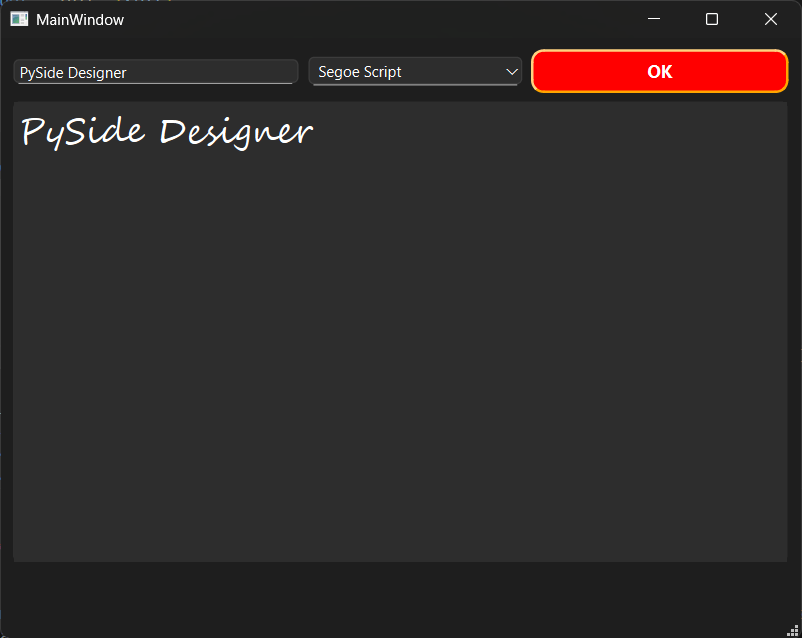
Créer un interface graphique avec Pyside Designer
Pour créer vos interface avec Qt sous Python, il existe un outil graphique Pyside Designer permettant de dessiner et définir des Interfaces Homme-Machine (IHM). Nous avons vu précédemment comment créer des interfaces graphique à l’aide de PySide et PyQT, nous...
Programmer avec OpenCV et VS Code en C++
Nous allons programmer à l’aide d’OpenCV et C++ sous VS Code. La configuration de VS Code et des librairies pour certains langages peut être compliqué. Nous verrons, dans ce tutoriel, comment configurer un ordinateur et VS Code pour pouvoir développer avec...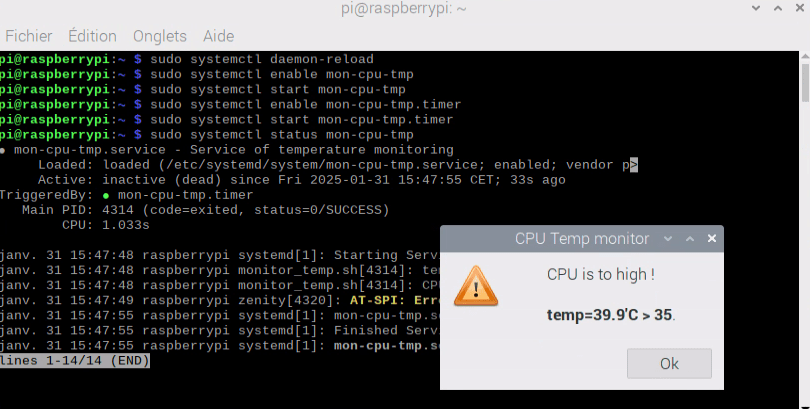
Lancer un programme au démarrage du Raspberry Pi
Il est pratique de lancer un programme ou un script au démarrage du Raspberry Pi, soit pour exécuter des tâches de fond ou lancer vos logiciels favoris dès le boot du Raspberry Pi et vous faire gagner du temps. Nous allons voir dans ce tutoriel, comment lancer...Produits
-
 Support servomoteur horizontal
Gratuit
Support servomoteur horizontal
Gratuit
-
 Fichier STL WillySR
Gratuit
Fichier STL WillySR
Gratuit
-
 Robot en kit Quadrina pour Servomoteur MG90S
208,33€
Robot en kit Quadrina pour Servomoteur MG90S
208,33€
-
 Axe servomoteur
Gratuit
Axe servomoteur
Gratuit
-
 AC DevShield ESP32
20,83€
AC DevShield ESP32
20,83€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license