Un MPCNC es el acrónimo de «Mostly Printed CNC», lo que significa que está construido principalmente a partir de piezas impresas en 3D. Se trata de una máquina CNC (control numérico por ordenador) que puede realizar operaciones de mecanizado, grabado, corte o fresado en diferentes materiales como madera, plástico o aluminio. La MPCNC está diseñada para ser asequible y fácil de construir, gracias a su arquitectura modular y al uso de componentes electrónicos de uso común. Se basa en el principio de una fresadora de pórtico o Láser, en la que un carro móvil se desplaza a lo largo de 3 ejes (X e Y principalmente, y Z para ajustar ligeramente la altura de la herramienta) mientras ésta realiza operaciones sobre el material. El MPCNC puede ser controlado por un software de CNC, que envía instrucciones precisas a los motores para mover los ejes de acuerdo con las coordenadas especificadas.Aquí, estamos utilizando MPCNC de V1 Engineering, para construir nuestro propio Gravure y Lase Cutter. La placa Ramps 1.4 es una placa de expansión electrónica utilizada en impresoras 3D y máquinas CNC. El término ‘Ramps’ es un acrónimo de ‘RepRap Arduino Mega Pololu Shield’. Está específicamente diseñada para trabajar con la plataforma Arduino Mega y ofrece un
Hardware
- Rampas 1.4 tarjeta
- Arduino Mega 2560
- 5 motores paso a paso: 17HS15-1504S-X1
- 3 controladores de motor paso a paso: DRV8825
- Fuente de alimentación Salida 12V y 20A: S-250-12
- 1 láser de 20 W: LD4070HA
- Cables.
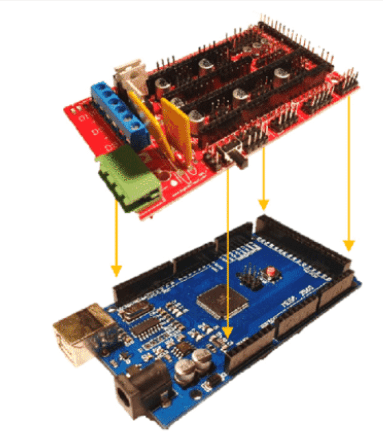
Montaje de Ramps 1.4 en Arduino Mega
Una vez que hayas montado la estructura de tu MPCNC, necesitas montar la electrónica, y para ello empezaremos con la Ramps 1.4. Como se ha descrito anteriormente, se trata de un Shield para una placa Arduino Mega, lo que hace que el montaje sea bastante sencillo. Todo lo que tienes que hacer es apilar los pines de las 2 placas:
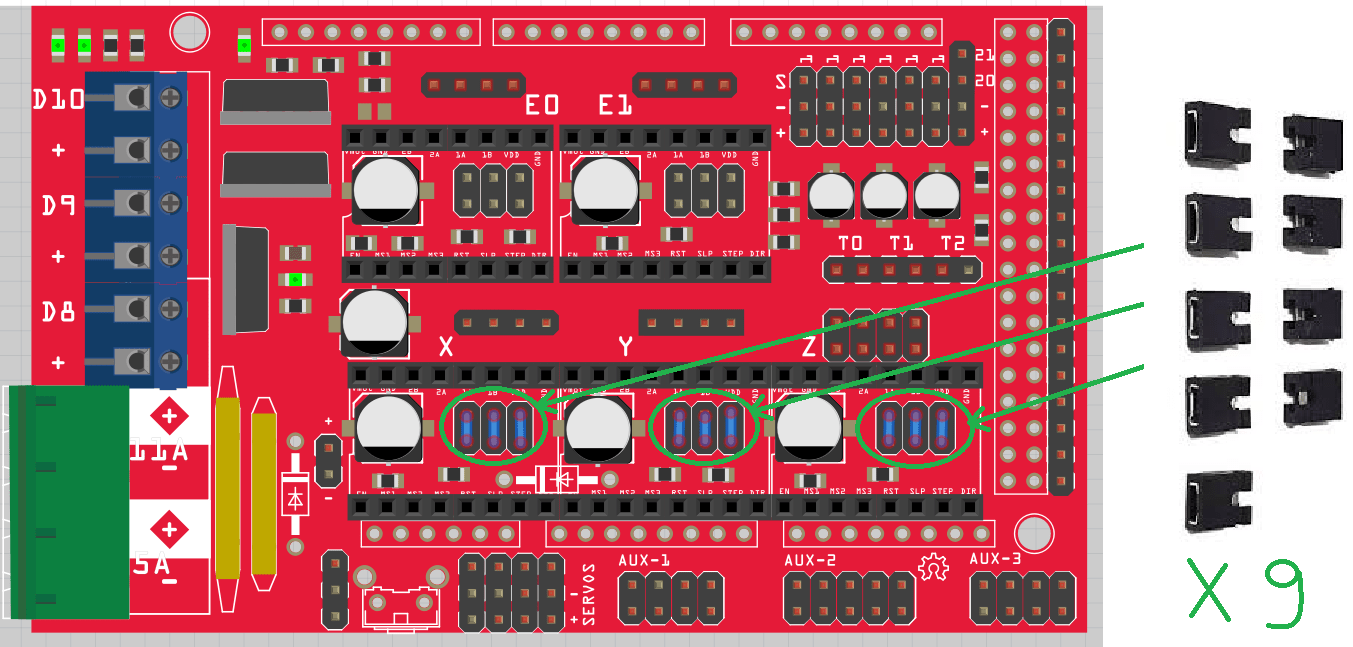
A continuación colocamos los jumpers para los drivers. Tenemos que conectar los pines que estarán debajo de los controladores en la placa, como :
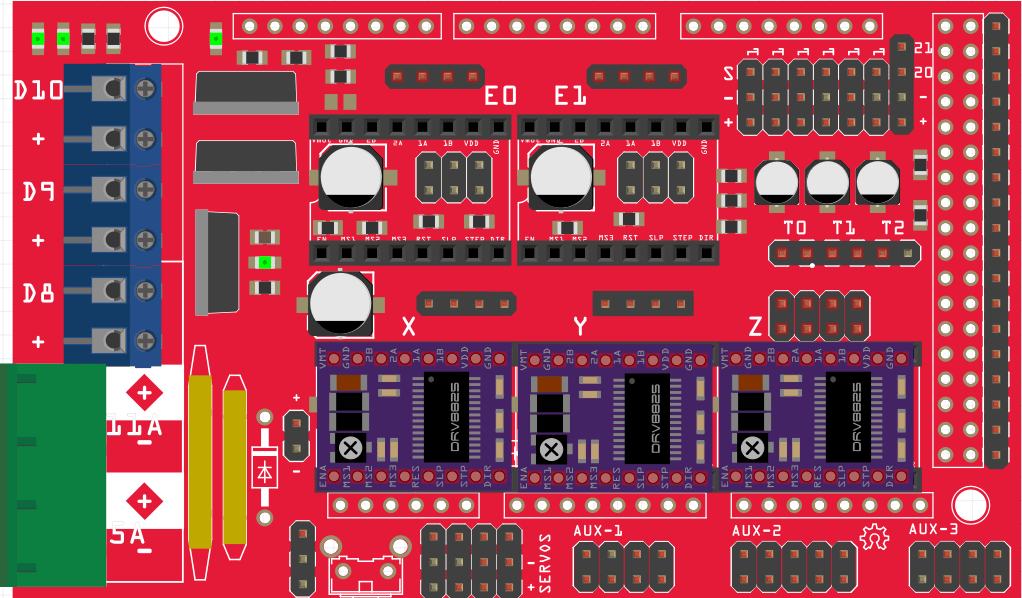
A continuación, pasamos a los controladores de los motores paso a paso, que permiten la comunicación entre los motores y la placa. También tienen la importantísima función de limitar la corriente en los motores para evitar sobrecalentamientos. Simplemente conéctalos en los pines correctos de los jumpers, como :
Ajuste del potenciómetro para cada conductor
Es MUY importante hacer este paso correctamente, porque si la corriente es demasiado alta, provocará el sobrecalentamiento de los motores, lo que acabará dañándolos durante largos periodos. Empecemos por calcular la corriente máxima que debe circular por los motores. Aquí, para el DRV8825, tenemos la siguiente ecuación: Corriente Límite = VREF x 2VREF es la tensión medida en los terminales del driver y ajustada con el potenciómetro y Corriente Límite es la Corriente/Fase consumida por tu motor, valor indicado en la hoja de datos de tu motor paso a paso. Aquí, para el 17HS15-1504S-X1 tenemos Corriente/Fase = 1,5 ADo para conocer el valor de VREF, tenemos VREF = Corriente Límite / 2 = 1,5 / 2 = 0,75 V.Sin embargo, aquí, nuestros motores paso a paso no llevan cargas pesadas, que requieren más corriente. 0,75 V siendo el máximo, podemos reducir este valor para limitar el sobrecalentamiento de los motores, al 60%. Por tanto, VREF(disminuido) = 0,75 x 0,6 = 0,45 V.
Ahora, después de conectar tu placa a la fuente de alimentación de 12V (recuerda ajustar la tensión de salida de la fuente de alimentación con un destornillador y midiendo la tensión a través de las salidas), coge un multímetro y mide VREF a través de los terminales del driver de la siguiente manera:
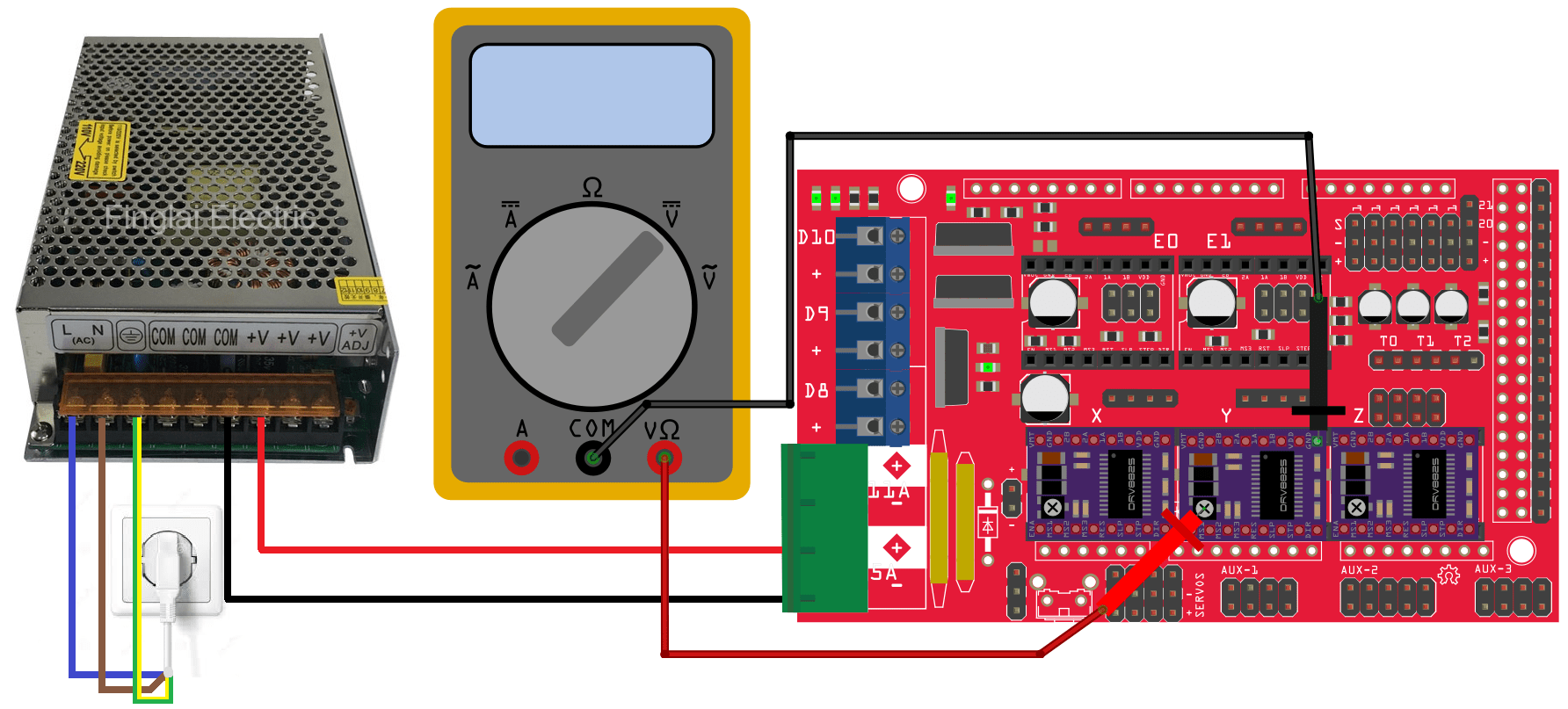
Puedes medir VREF directamente entre la masa del driver y el potenciómetro. Para ajustar, necesitarás un destornillador bastante fino para manipular el tornillo del potenciómetro y cambiar el valor de VREF al voltaje deseado, en este caso 0,45V.
Conexión de motores paso a paso
Una vez configurada la VREF, puedes conectar los motores paso a paso. Puedes ver aquí que en nuestra máquina, tenemos dos motores paso a paso para cada uno de los ejes X e Y, lo que significa que necesitan ser conectados en serie para que puedan ser controlados por el mismo controlador. También se pueden conectar en paralelo, pero lo desaconsejamos porque consumirían más corriente.
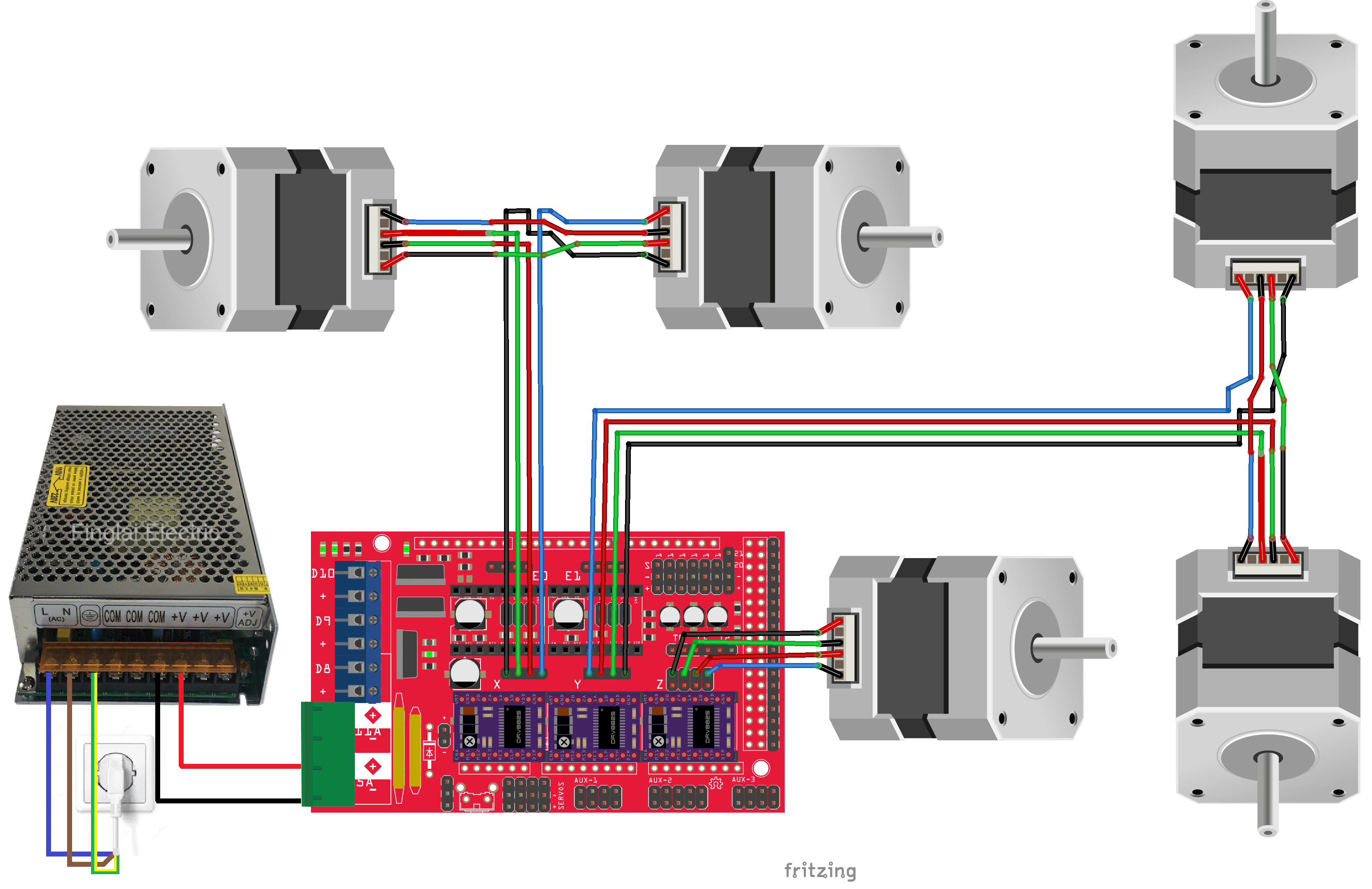
Puedes ver que los motores paso a paso están conectados en serie, lo que significa que hay que cortar y volver a soldar los cables. Los colores que aparecen en este esquema son los de los cables que se suelen vender con los motores paso a paso. Presta mucha atención al orden de los cables cuando los conectes. También puede observar que el eje Y del diagrama no tiene los colores de los cables en el mismo orden que los demás, sino en orden inverso. Esto es normal, puedes invertir el orden de los colores conectados a la tarjeta Ramps 1.4 para invertir el sentido de giro de los motores, de forma que coincidan con tu instalación. Tendrás que hacer algunas pruebas para saber si giran en el sentido correcto.
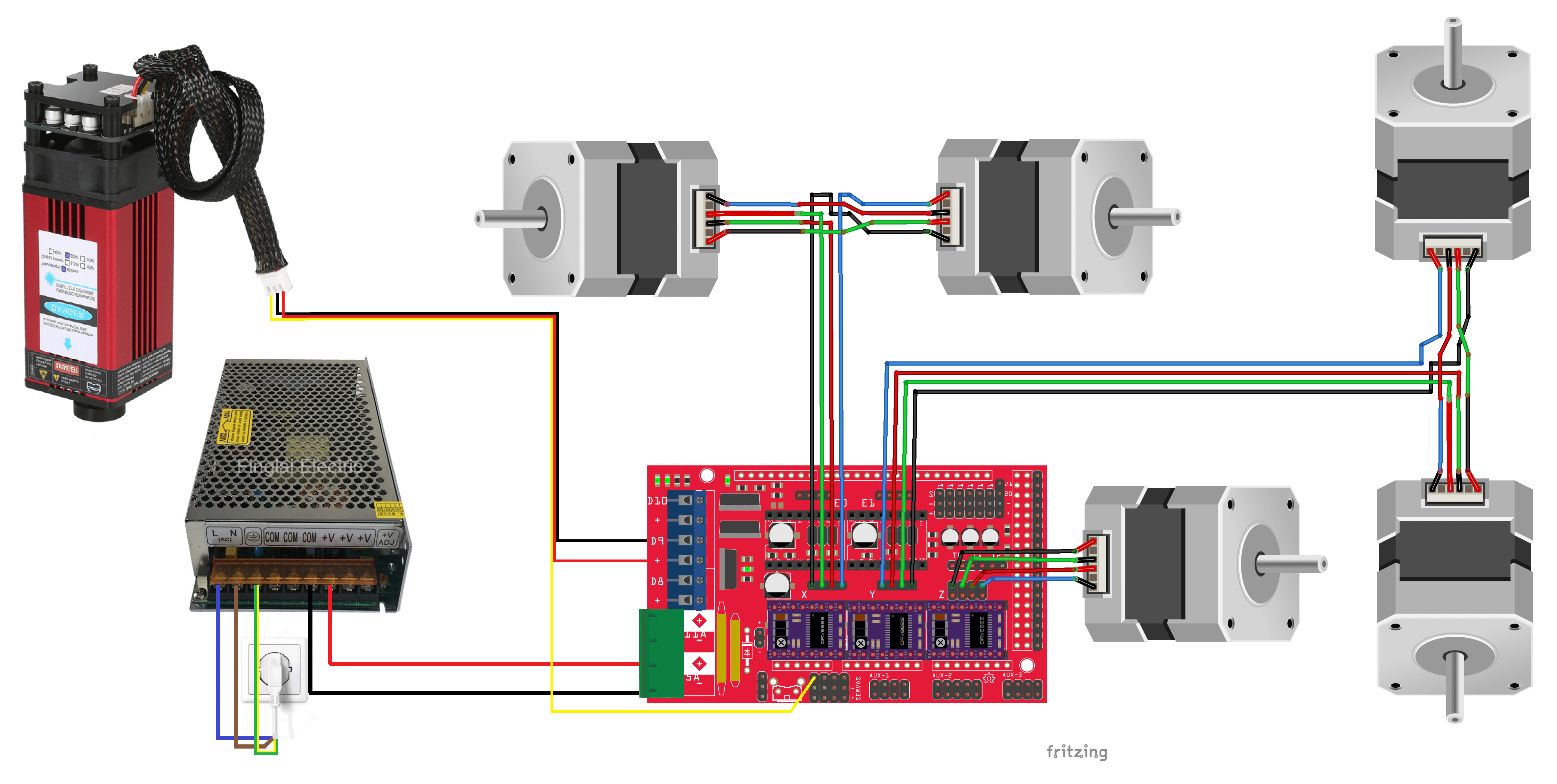
Conexión láser
Este es un paso que puede variar porque depende de la herramienta que esté conectando a su MPCNC. Aquí tomaremos como ejemplo el láser LD4070HA de 20W. Lo alimentaremos con 12V a través del pin D9 y controlaremos la potencia del láser a través del pin Digital 11 en PWM.
El cableado eléctrico ya está completo. Para el software y el firmware, puedes seguir este tutorial.
Fuentes :
- https://docs.v1e.com/electronics/ramps/
- https://docs.v1e.com/mpcnc/intro/
- https://docs.v1e.com/electronics/steppers/
- https://forum.v1e.com/t/stepper-motor-voltage/18573
- https://www.youtube.com/watch?v=89BHS9hfSUk
- http://voidmicro.com/Products/Laser/LD4070HA-en.html?page=page_laser



