Partage de données entre deux programmes via JSON
Il est possible d’échanger des données entre deux programmes via du texte au format JSON. Lorsqu’un système utilise différents processus, il est intéressant de pouvoir échanger des données entre tâches. Une méthode possible est d’utiliser un texte dans un...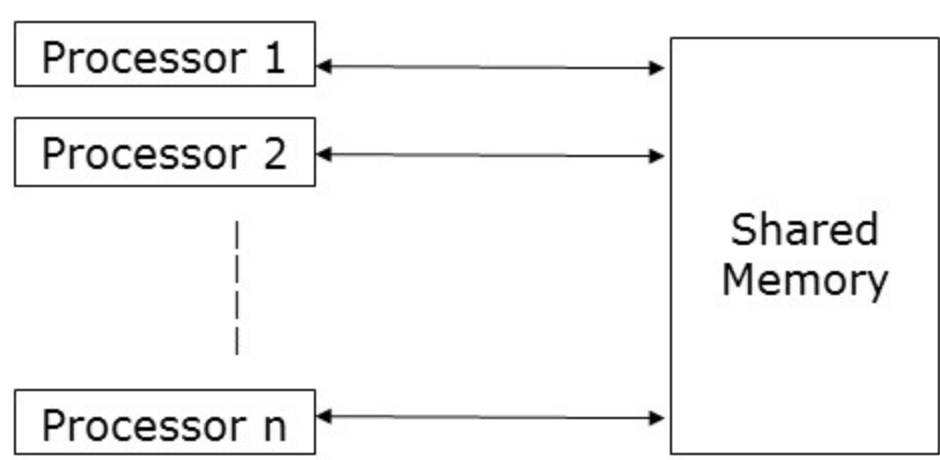
Utilisation de mémoire pour le partage de données en Python
L’utilisation de mémoire partagée, ou Shared memory, est une solution efficace pour échanger des données entre différents process d’une même application. Nous allons voir dans ce tutoriel l’utilisation de la librairie disponible en Python (qui existe...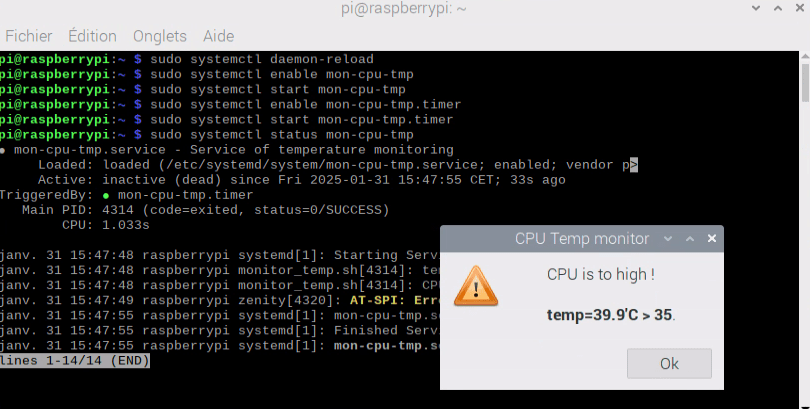
Lancer un programme au démarrage du Raspberry Pi
Il est pratique de lancer un programme ou un script au démarrage du Raspberry Pi, soit pour exécuter des tâches de fond ou lancer vos logiciels favoris dès le boot du Raspberry Pi et vous faire gagner du temps. Nous allons voir dans ce tutoriel, comment lancer...
Créer une application de bureau avec Electron
Nous allons voir dans ce tutoriel comment créer une application de bureau avec le framework Electron. Cet environnement de programmation permet de développer des IHM à l’aide des langages Web JavaScript, HTML et CSS compatible sur plusieurs OS. Mise en place de...Produits
-
 Robot en kit Quadrina pour Servomoteur MG90S
208,33€
Robot en kit Quadrina pour Servomoteur MG90S
208,33€ -
 Kit Arduino pour débutant
82,50€
Kit Arduino pour débutant
82,50€ -
 Support servomoteur horizontal
Gratuit
Support servomoteur horizontal
Gratuit -
 Ordinateur monocarte Rock Pi 4 SE 4 Go
85,00€
Ordinateur monocarte Rock Pi 4 SE 4 Go
85,00€ -
 Support servomoteur vertical
Gratuit
Support servomoteur vertical
Gratuit
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license