O módulo de rádio NRF24L01 é um transceptor que permite estabelecer uma comunicação por ondas de rádio entre dois dispositivos e possibilitar a transferência de dados entre eles.
Material
- Computador
- 2 x Arduino UNO
- Cabo USB A Macho/B Macho
- 2 x NRF24L01
Princípio de funcionamento
O módulo NRF24l01 é um transceptor de baixa potência que permite a troca de dados sem o uso de cabos na faixa de radiofrequência de 2,4GHz. Ele estabelece uma comunicação eficaz entre dispositivos posicionados a distâncias médias (50 m) e em vista direta, ou seja, sem obstáculos interpostos. Para comunicar a longas distâncias ao ar livre, é preferível usar um módulo RF433 ou LoRa. Em ambientes fechados, se houver uma ou mais paredes entre o transmissor e o receptor, é melhor optar pela comunicação WiFi ou Bluetooth.
Esquema
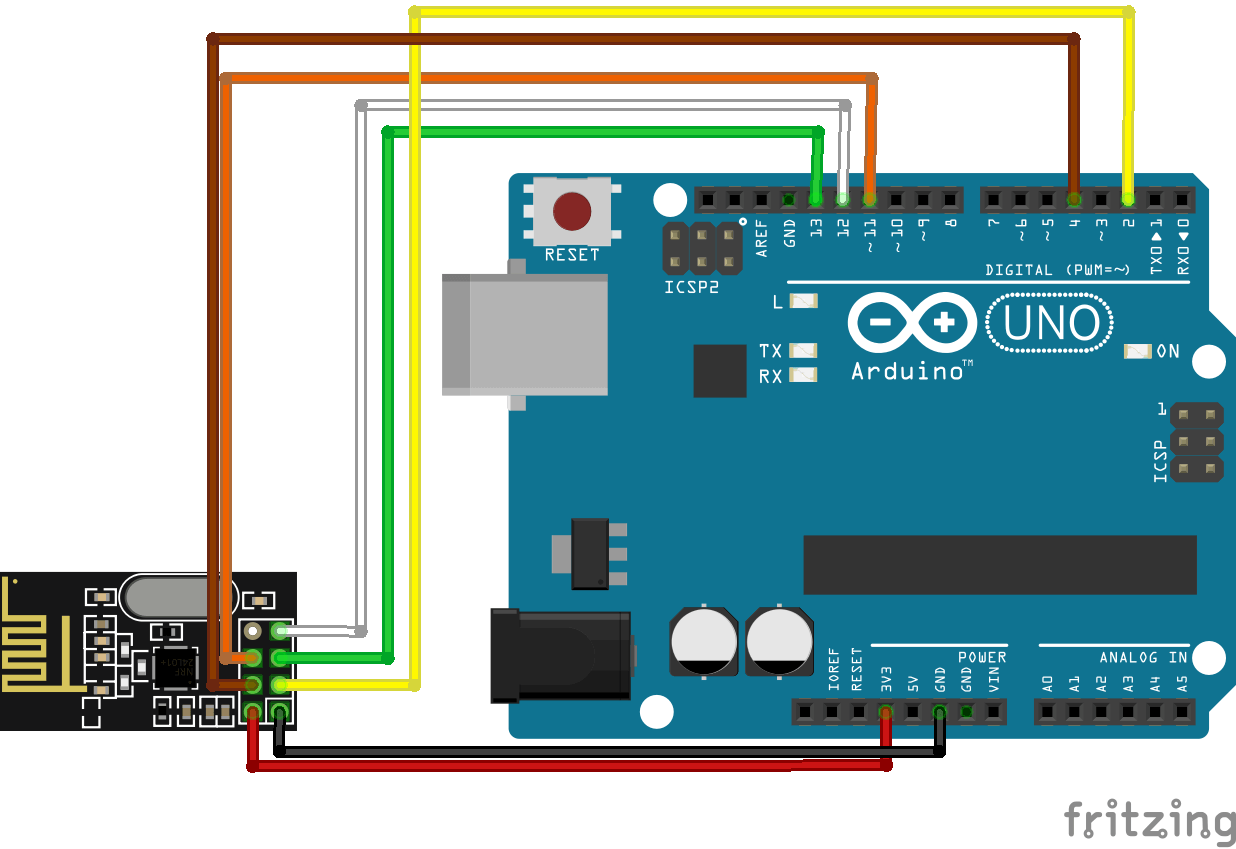
O módulo NRF24L01 utiliza o protocolo SPI para comunicar com o microcontrolador e deve ser alimentado entre 1,9 e 3,6V. A comunicação SPI usa pinos específicos ligados da seguinte forma (lado esquerdo NRF24L01, lado direito Arduino UNO):
- Vcc (Fonte de alimentação) <-> 3V3
- CE (Reinicialização) <-> 2
- GND (Terra) <-> GND
- MOSI (Master Output Slave Input) <-> 11
- MISO (Master Input Slave Output) <-> 12
- SCK (Serial Clock) <-> 13
- CS (chip select) <-> 4
Em alguns módulos, para melhorar o alcance e a estabilidade da comunicação, é recomendado soldar um condensador entre os pinos Vcc e GND.
Código
Para gerir o módulo NRF24L01, utilizamos as bibliotecas RF24.h, nRF24L01.h e SPI.h. No código a seguir, que funciona para o master (role=0) e para o slave (role=1), definimos um nó para cada módulo, sendo um para enviar os dados e outro para recebê-los.
//Libraries
#include <RF24.h>//https://github.com/nRF24/RF24
#include <nRF24L01.h>//https://github.com/nRF24/RF24/blob/master/nRF24L01.h
#include <SPI.h>//https://www.arduino.cc/en/reference/SPI
//Parameters
byte addresses[2] [6] = {"Node1", "Node2"};
bool radioNumber = 0;
bool role = 0;
//Variables
int masterStatus = 0;
byte cmd = 0;
int slaveStatus = 0;
unsigned long myData = 0;
//Objects
RF24 radio(2, 4);
void setup() {
//Init Serial USB
Serial.begin(9600);
Serial.println(F("Initialize System"));
//Init radio rf24
radio.begin();
//radio.setChannel(125);
radio.setPALevel(RF24_PA_LOW); // Set the PA Level low to prevent power supply related issues. RF24_PA_MAX is default.
//radio.setDataRate(RF24_250KBPS);//(RF24_250KBPS);//(RF24_2MBPS);
//radio.setAutoAck(1); // Ensure autoACK is enabled
//radio.enableAckPayload(); // Allow optional ack payloads
//radio.setRetries(2,15); // Smallest time between retries, max no. of retries
//radio.setAddressWidth(3);
//radio.setCRCLength(RF24_CRC_8); // Use 8-bit CRC for performance
//radio.setPayloadSize(16); // Here we are sending 1-byte payloads to test the call-response speed
//radio.printDetails(); // Dump the configuration of the rf unit for debugging. Not working on nano
// Open a writing and reading pipe on each radio, with opposite addresses
if (radioNumber) {
radio.openWritingPipe(addresses[1]);
radio.openReadingPipe(1, addresses[0]);
} else {
radio.openWritingPipe(addresses[0]);
radio.openReadingPipe(1, addresses[1]);
}
myData = 1.22;
// Start the radio listening for data
radio.startListening();
}
void loop() {
testRF24();
}
void testRF24( ) { /* function testRF24 */
////Test RF24communication change radioNumber and radio to 0(receiver) or 1(transmitter)
if (role == 1) {
masterRole();
} else {
slaveRole();
}
}
void masterRole( ) { /* function masterRole */
////emit data
radio.stopListening(); // First, stop listening so we can talk.
Serial.println(F("Now sending"));
myData = micros();
if (!radio.write( &myData, sizeof(myData) )) {
Serial.println(F("failed"));
}
//Serial.print("width : ");Serial.println(radio.R_RX_PL_WID );
radio.startListening(); // Now, continue listening
unsigned long started_waiting_at = micros(); // Set up a timeout period, get the current microseconds
boolean timeout = false; // Set up a variable to indicate if a response was received or not
while ( ! radio.available() ) { // While nothing is received
if (micros() - started_waiting_at > 200000 ) { // If waited longer than 200ms, indicate timeout and exit while loop
timeout = true;
break;
}
}
if ( timeout ) { // Describe the results
Serial.println(F("Failed, response timed out."));
} else {
// Grab the response, compare, and send to debugging spew
radio.read( &myData, sizeof(myData) );
myData = micros();
// Spew it
Serial.print(F("Sent "));
Serial.print(myData);
Serial.print(F(", Got response "));
Serial.print(myData);
//Serial.println(myData.value);
}
// Try again 1s later
delay(1000);
}
void slaveRole( ) { /* function slaveRole */
////recieve data
if ( radio.available()) {
// Variable for the received timestamp
while (radio.available()) { // While there is data ready
radio.read( &myData, sizeof(myData) ); // Get the payload
}
radio.stopListening(); // First, stop listening so we can talk
Serial.print(F("Transmission "));
Serial.println(myData);
//myData.value += 0.01; // Increment the float value
radio.write( &myData, sizeof(myData) ); // Send the final one back.
radio.startListening(); // Now, resume listening so we catch the next packets.
Serial.print(F(" - Sent response "));
Serial.println(myData);
//Serial.print(F(" : "));
//Serial.println();
}
}
Aplicações
- Criar um controle remoto para controlar o seu projeto Arduino
- Troca de dados entre dois Arduinos
Fontes
- https://github.com/nRF24/RF24
- https://github.com/nRF24/RF24/blob/master/nRF24L01.h
- https://www.arduino.cc/en/reference/SPI
- Protocolos de comunicação
Retrouvez nos tutoriels et d’autres exemples dans notre générateur automatique de code
La Programmerie