Le module radio NRF24L01 est un émetteur-récepteur permettant d’établir une connexion et de transférer des données d’un appareil à un autre via des ondes radio.
Matériel
- Ordinateur
- Arduino UNO x2
- Câble USB A Mâle/B Mâle
- NRF24L01 x2
Principe de fonctionnement
Le module nRF24l01 est un émetteur-récepteur faible puissance qui permet l’échange de données sans fil sur la bande de fréquence radio 2.4GHz. Il permet de communiquer entre deux appareils de manière efficace et sur une moyenne distance (50m) lorsque ces derniers sont en vue directe, c’est-à-dire sans obstacle. Si vous souhaitez communiquer sur de plus longues distances en extérieur, il faudra préférer un module RF433 ou LoRa. En intérieur, si un ou plusieurs murs sont présents entre l’émetteur et le récepteur, il sera préférable d’utiliser la communication WiFi ou Bluetooth.
Schéma
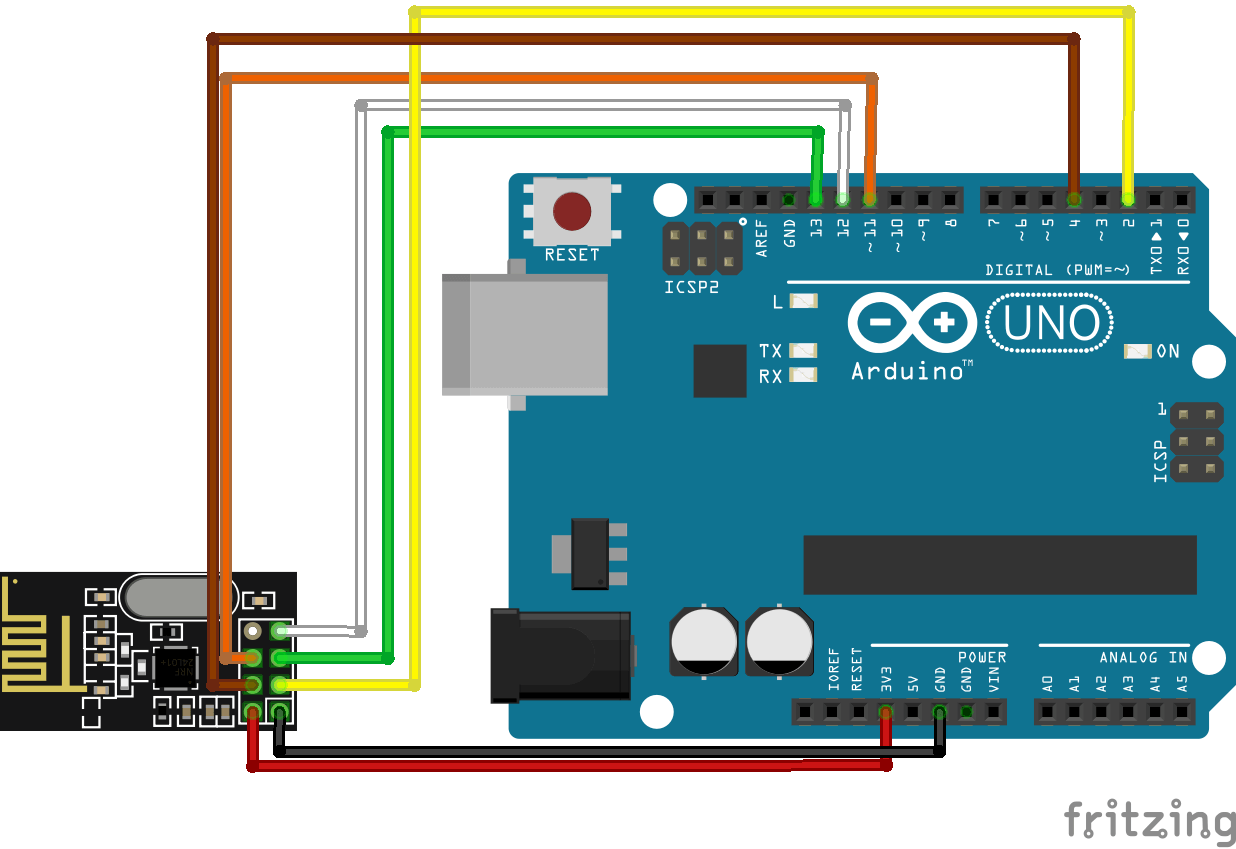
Le module nRF24L01 utilise la protocole SPI pour communiquer avec le microcontrôleur et doit être alimenté entre 1.9 et 3.6V. La communication SPI utilise des boches spécifiques.Le brochage se fait comme suit (à gauche côté NRF24L01, à droite côté Arduino UNO):
- Vcc (Alimentation) <-> 3V3
- CE (Reset) <-> 2
- GND (Masse) <-> GND
- MOSI (Master Output Slave Input) <-> 11
- MISO (Master Input Slave Output) <-> 12
- SCK (Serial Clock) <-> 13
- CS (chip select) <-> 4
Pour améliorer la portée et la stabilité de la connexion, il est conseillé de souder un condensateur entre les broches Vcc et GND sur certains modules.
Code
Pour gérer le module NRF24L01 nous utilisons les librairies RF24.h, nRF24L01.h et SPI.h. Dans le code suivant, qui fonctionne pour le maître (role=0) et l’esclave (role=1), nous définissons un noeud pour chaque module, un qui va envoyer des données l’autre qui va les recevoir.
//Libraries
#include <RF24.h>//https://github.com/nRF24/RF24
#include <nRF24L01.h>//https://github.com/nRF24/RF24/blob/master/nRF24L01.h
#include <SPI.h>//https://www.arduino.cc/en/reference/SPI
//Parameters
byte addresses[2] [6] = {"Node1", "Node2"};
bool radioNumber = 0;
bool role = 0;
//Variables
int masterStatus = 0;
byte cmd = 0;
int slaveStatus = 0;
unsigned long myData = 0;
//Objects
RF24 radio(2, 4);
void setup() {
//Init Serial USB
Serial.begin(9600);
Serial.println(F("Initialize System"));
//Init radio rf24
radio.begin();
//radio.setChannel(125);
radio.setPALevel(RF24_PA_LOW); // Set the PA Level low to prevent power supply related issues. RF24_PA_MAX is default.
//radio.setDataRate(RF24_250KBPS);//(RF24_250KBPS);//(RF24_2MBPS);
//radio.setAutoAck(1); // Ensure autoACK is enabled
//radio.enableAckPayload(); // Allow optional ack payloads
//radio.setRetries(2,15); // Smallest time between retries, max no. of retries
//radio.setAddressWidth(3);
//radio.setCRCLength(RF24_CRC_8); // Use 8-bit CRC for performance
//radio.setPayloadSize(16); // Here we are sending 1-byte payloads to test the call-response speed
//radio.printDetails(); // Dump the configuration of the rf unit for debugging. Not working on nano
// Open a writing and reading pipe on each radio, with opposite addresses
if (radioNumber) {
radio.openWritingPipe(addresses[1]);
radio.openReadingPipe(1, addresses[0]);
} else {
radio.openWritingPipe(addresses[0]);
radio.openReadingPipe(1, addresses[1]);
}
myData = 1.22;
// Start the radio listening for data
radio.startListening();
}
void loop() {
testRF24();
}
void testRF24( ) { /* function testRF24 */
////Test RF24communication change radioNumber and radio to 0(receiver) or 1(transmitter)
if (role == 1) {
masterRole();
} else {
slaveRole();
}
}
void masterRole( ) { /* function masterRole */
////emit data
radio.stopListening(); // First, stop listening so we can talk.
Serial.println(F("Now sending"));
myData = micros();
if (!radio.write( &myData, sizeof(myData) )) {
Serial.println(F("failed"));
}
//Serial.print("width : ");Serial.println(radio.R_RX_PL_WID );
radio.startListening(); // Now, continue listening
unsigned long started_waiting_at = micros(); // Set up a timeout period, get the current microseconds
boolean timeout = false; // Set up a variable to indicate if a response was received or not
while ( ! radio.available() ) { // While nothing is received
if (micros() - started_waiting_at > 200000 ) { // If waited longer than 200ms, indicate timeout and exit while loop
timeout = true;
break;
}
}
if ( timeout ) { // Describe the results
Serial.println(F("Failed, response timed out."));
} else {
// Grab the response, compare, and send to debugging spew
radio.read( &myData, sizeof(myData) );
myData = micros();
// Spew it
Serial.print(F("Sent "));
Serial.print(myData);
Serial.print(F(", Got response "));
Serial.print(myData);
//Serial.println(myData.value);
}
// Try again 1s later
delay(1000);
}
void slaveRole( ) { /* function slaveRole */
////recieve data
if ( radio.available()) {
// Variable for the received timestamp
while (radio.available()) { // While there is data ready
radio.read( &myData, sizeof(myData) ); // Get the payload
}
radio.stopListening(); // First, stop listening so we can talk
Serial.print(F("Transmission "));
Serial.println(myData);
//myData.value += 0.01; // Increment the float value
radio.write( &myData, sizeof(myData) ); // Send the final one back.
radio.startListening(); // Now, resume listening so we catch the next packets.
Serial.print(F(" - Sent response "));
Serial.println(myData);
//Serial.print(F(" : "));
//Serial.println();
}
}
Applications
- Créer une radiocommande pour piloter votre projet Arduino
- Échanger des données entre deux Arduino
Sources
- https://github.com/nRF24/RF24
- https://github.com/nRF24/RF24/blob/master/nRF24L01.h
- https://www.arduino.cc/en/reference/SPI
- Protocoles de communication
Retrouvez nos tutoriels et d’autres exemples dans notre générateur automatique de code
La Programmerie