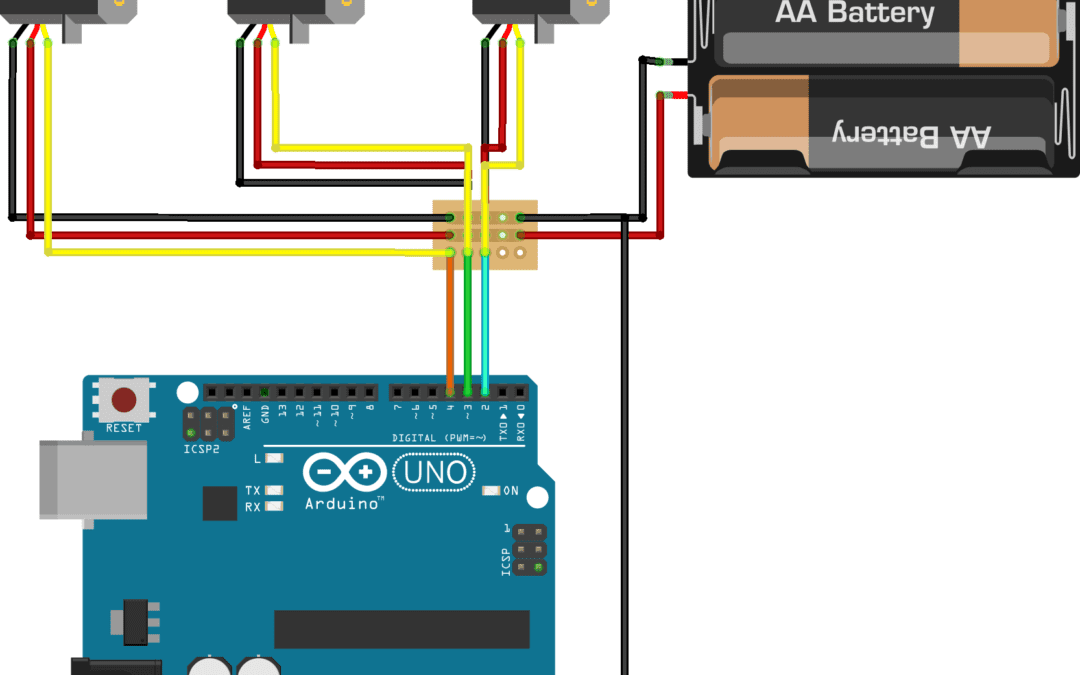
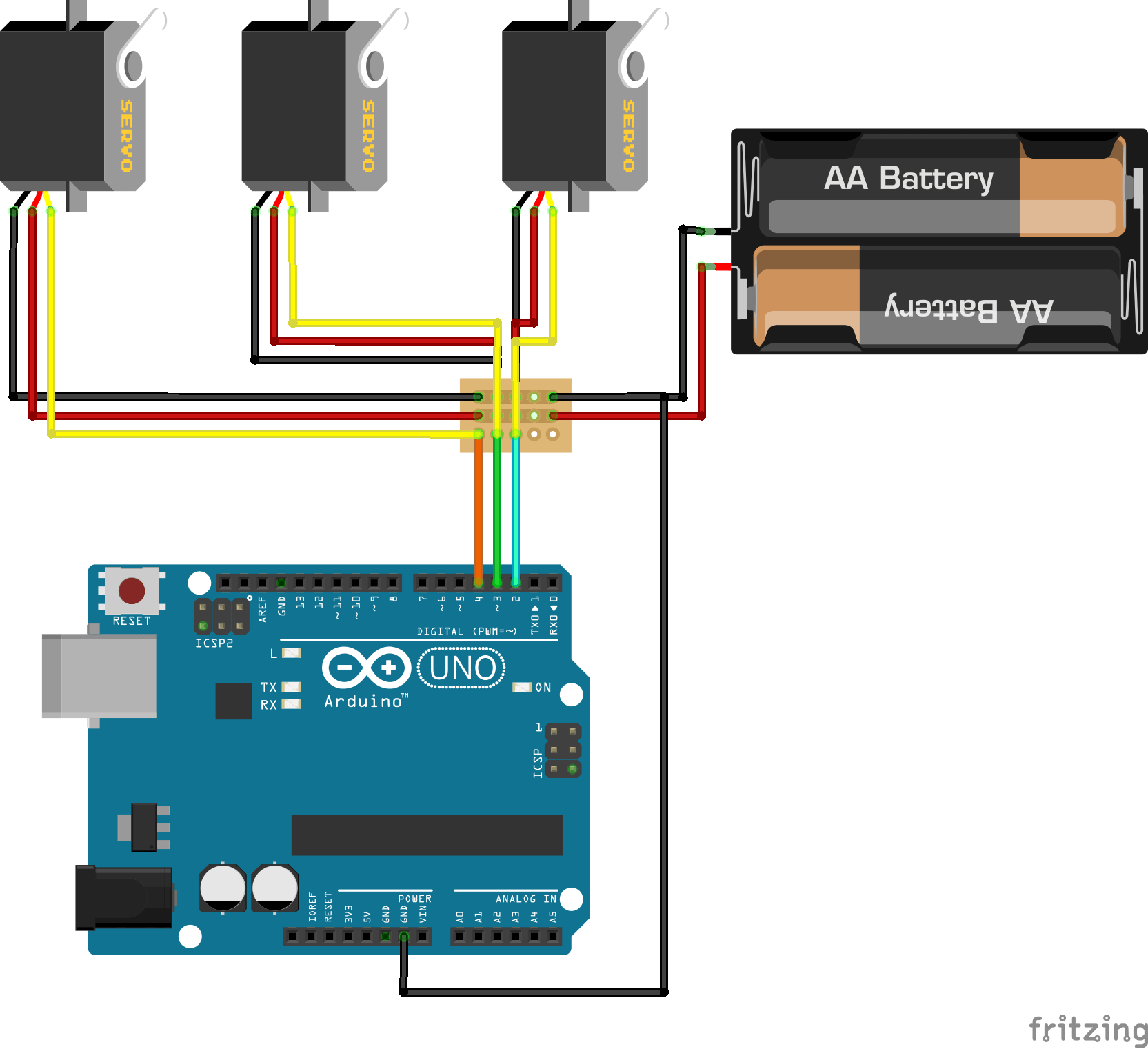
Para controlar una gran cantidad de servomotores con Arduino u otro microcontrolador, se debe utilizar un controlador de servomotor para alimentar y enviar las señales PWM a los Servomotores. Se pueden usar varios métodos, como el uso de un escudo de ruptura o un servocontrolador en serie, pero es posible que desee una configuración particular. En este tutorial, aprenderá cómo hacer su propio servocontrolador que le permitirá administrar los sensores y / o servos a su gusto.
Material
- Alicates planos
- Cortador
- Soldador
- Break away header• fils de connexion
- Tablero experimental perforado
- Conector para la batería
Procedimiento
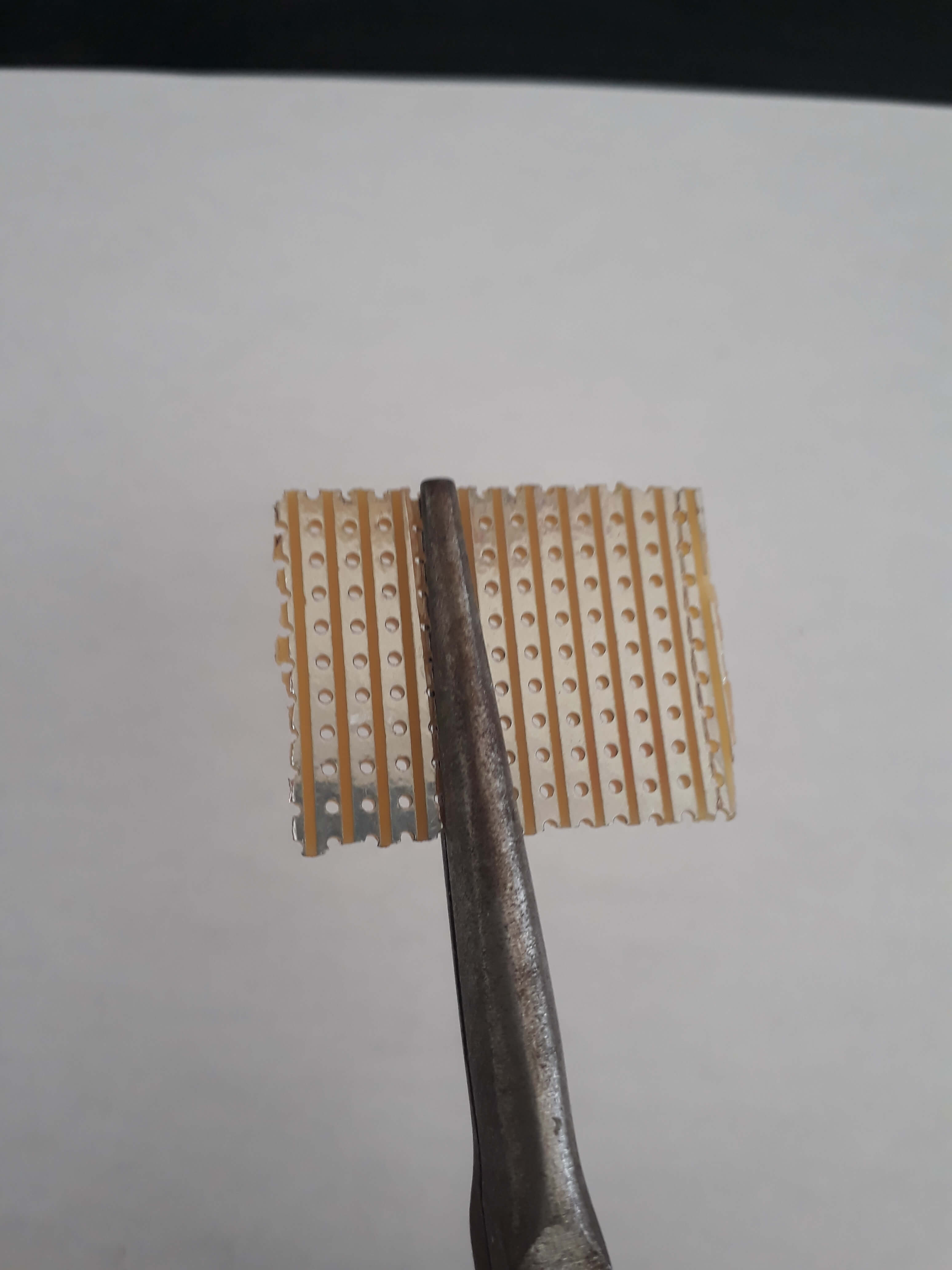
1. Tablero experimental perforado
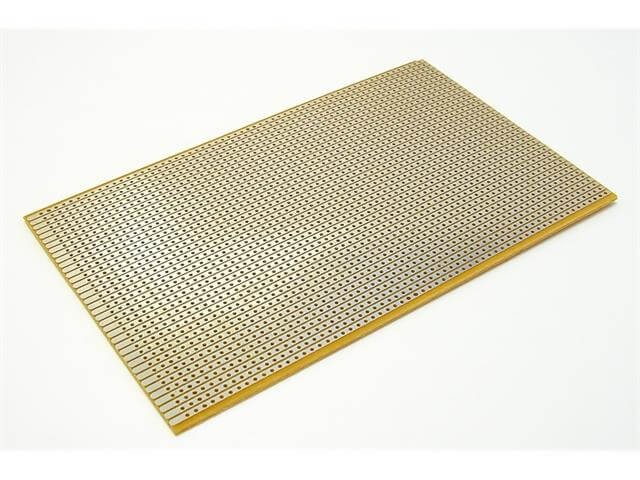
En este tutorial, las pistas perforadas del tablero tienen un patrón de línea. Este patrón puede modificarse según el que use.
Cortar el tablero al tamaño deseado. Asegúrese de mantener el número correcto de agujeros. Dibuje una línea con el cortador entre los agujeros que desea cortar. Esto debilitará el plástico y permitirá un corte preciso.
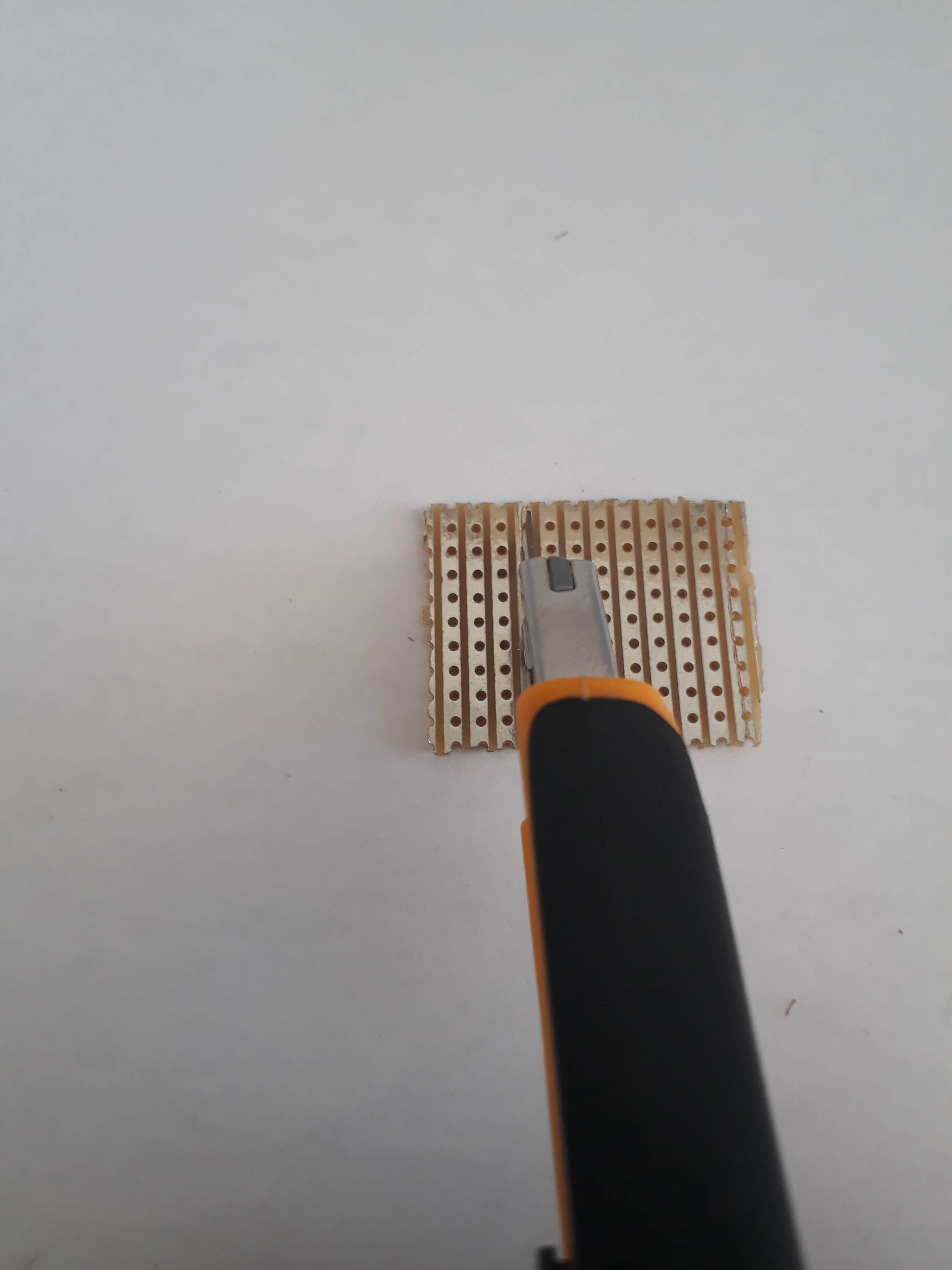
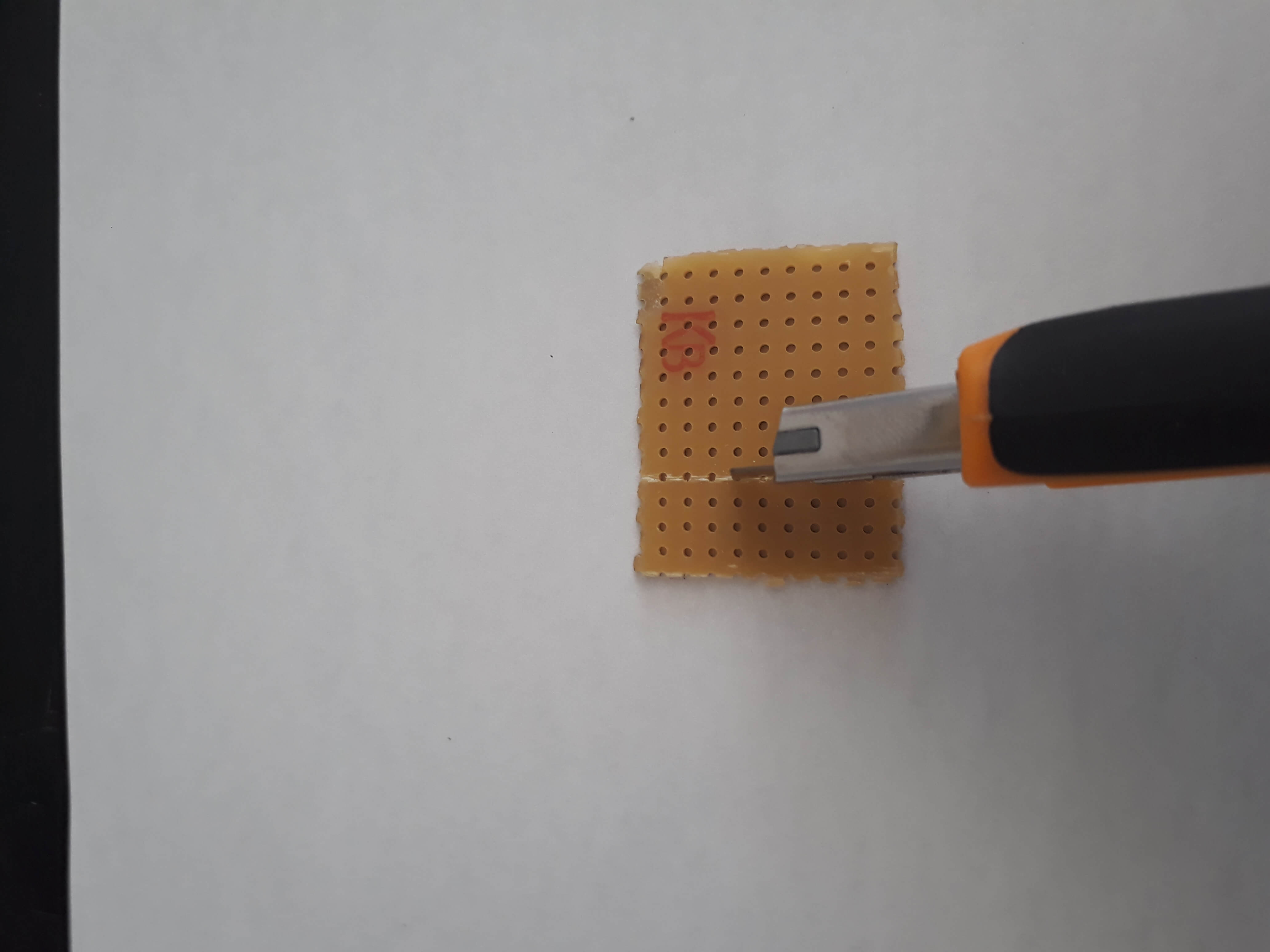
Usa los alicates para dividir el tablero.
Una vez que se corta el tablero experimental, puede eliminar el cobre restante en el costado usando el cortador o una lima plana.
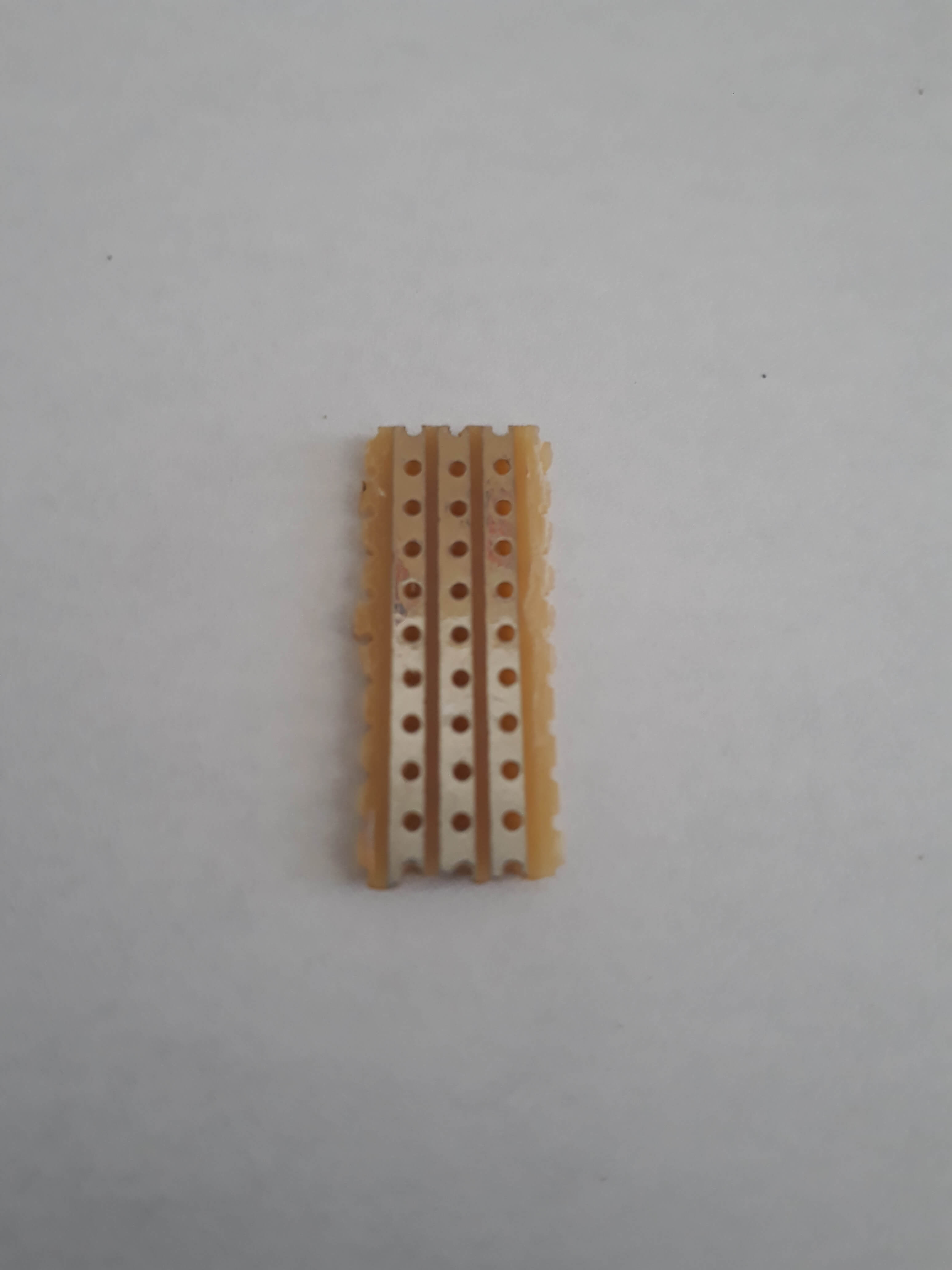
Con el cortador, retire el cobre entre los agujeros donde se enchufarán las salidas PWM para garantizar el aislamiento eléctrico.

Para verificar el aislamiento entre las pistas, puede usar un multímetro.

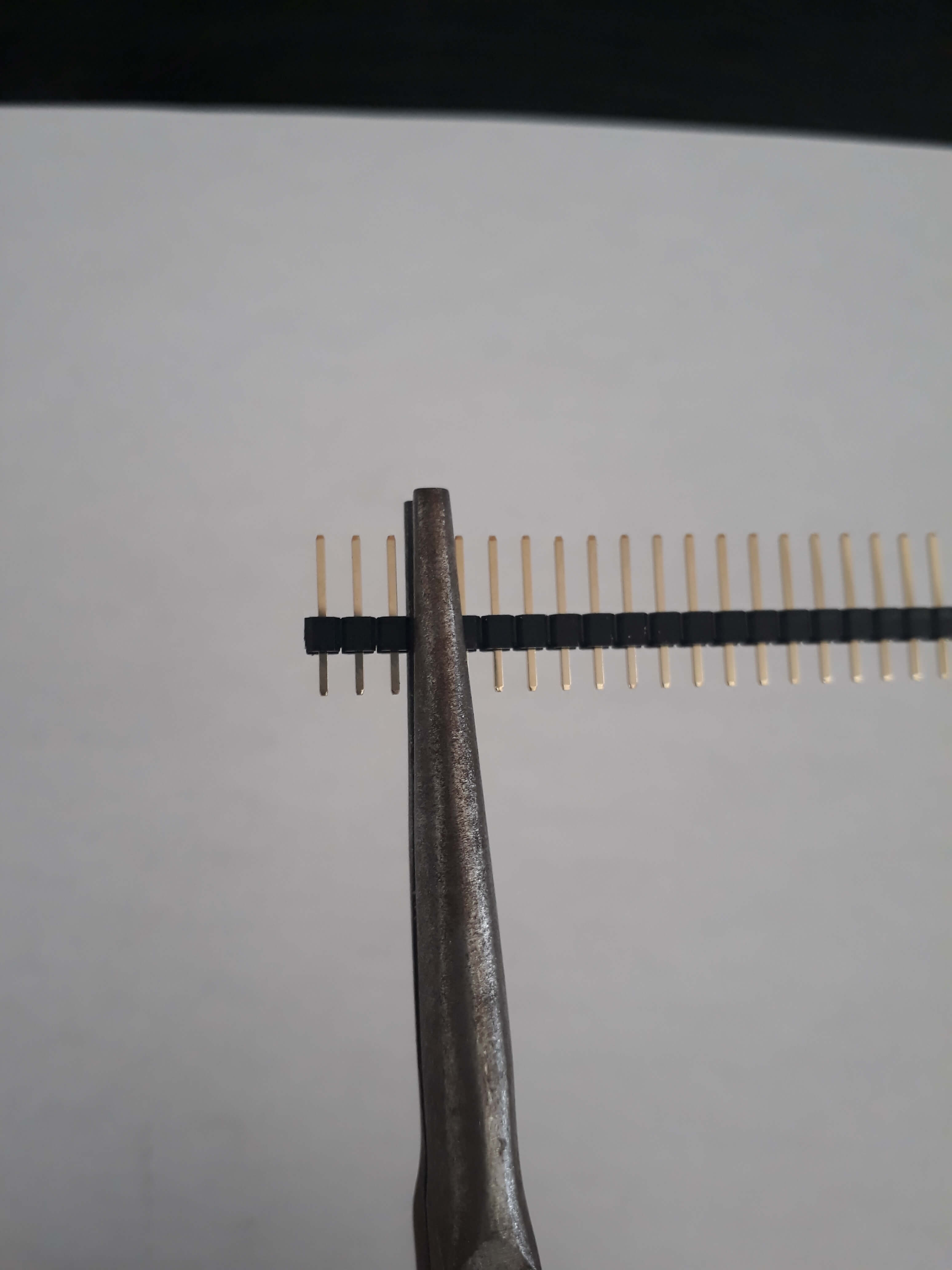
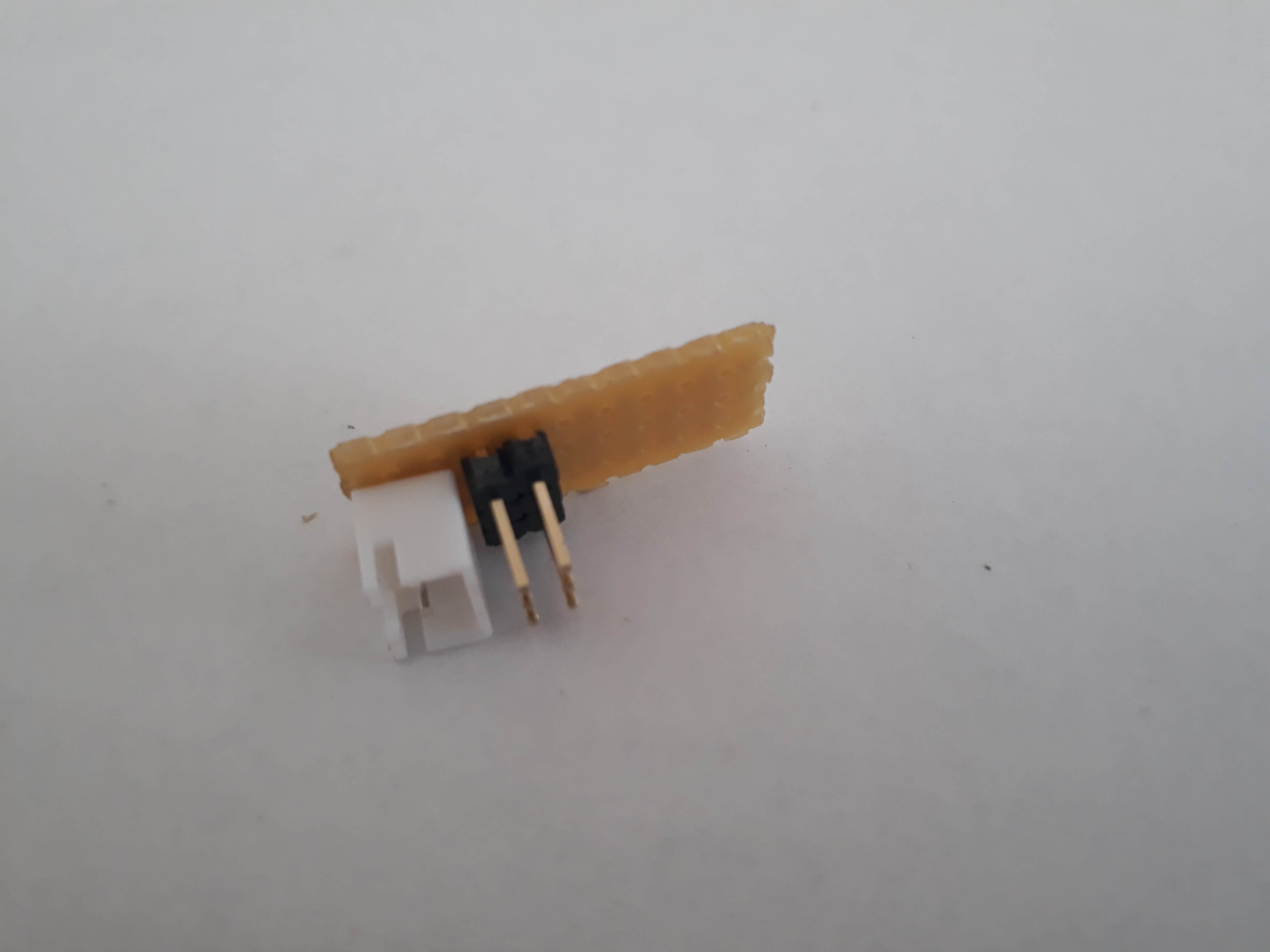
2. Break away header

Corte el encabezado del pasador por grupo de tres con los alicates planos. Tome todo lo que necesite para servomotor o sensor. Recuerde que la cantidad de servomotor que puede controlar está limitada a la cantidad de salidas PWM de su placa.
Puede controlar fácilmente 12 servos con un Arduino UNO.
Suelde los pines como se muestra en las siguientes imágenes.
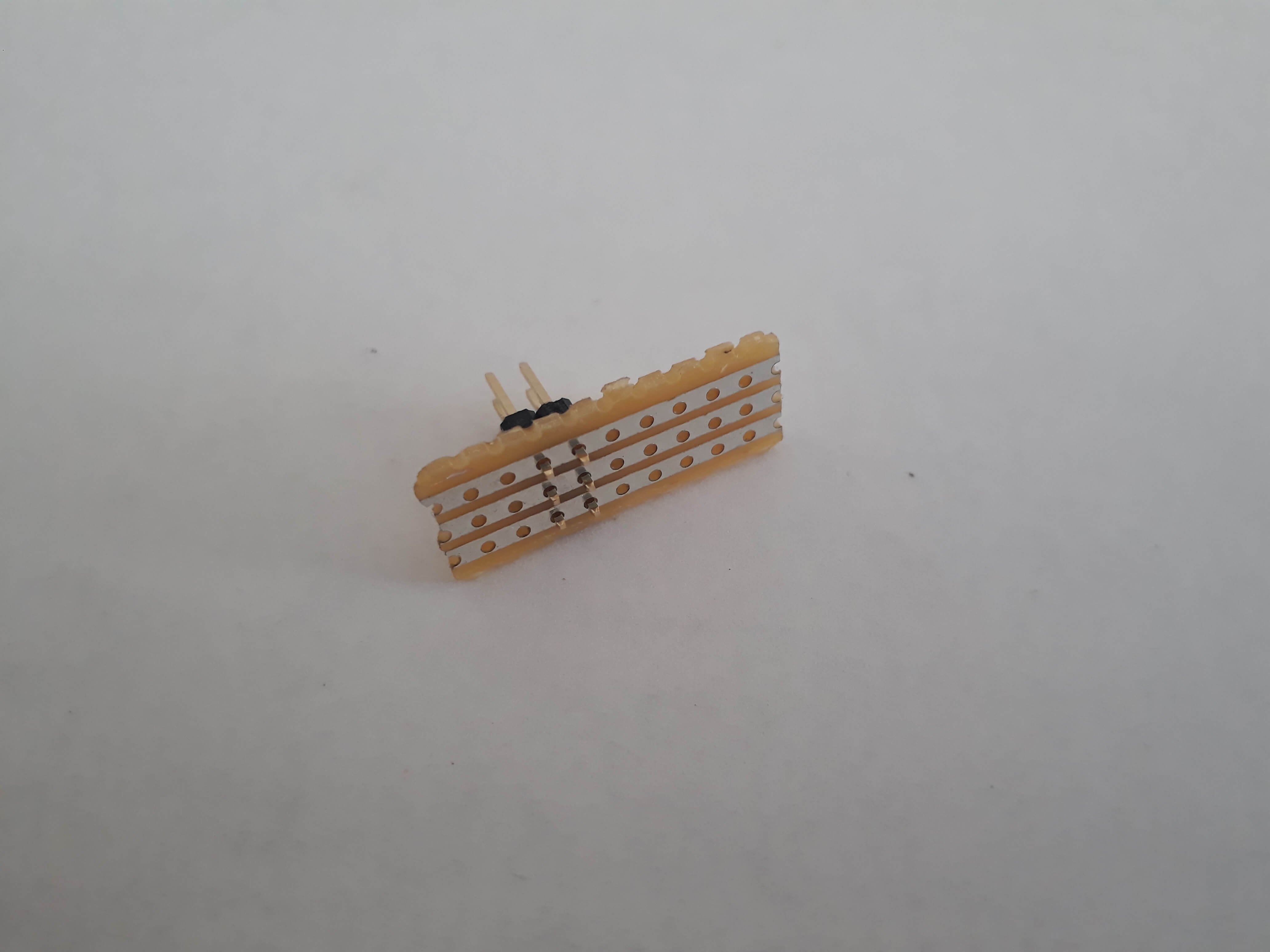
Una vez que haya terminado de soldar, verifique el aislamiento entre pistas.
3. Conexión de batería
Agregue un conector a la placa que corresponda al tipo utilizado por la batería. Para este proyecto, utilizamos un conector JST que es ampliamente utilizado para baterías LiPo.
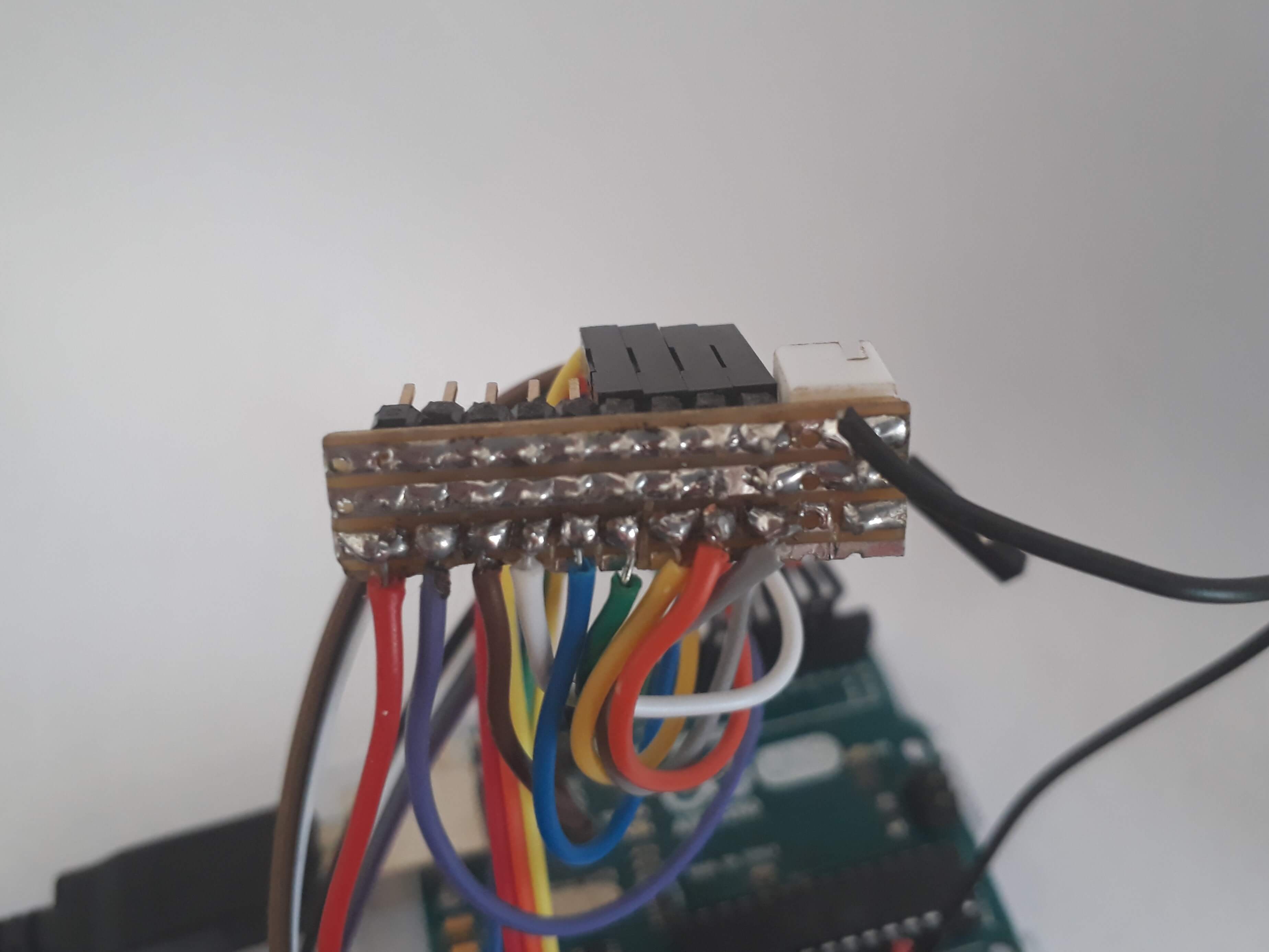
4. Wiring
Suelde los cables al encabezado del pin que se conectará a la salida PWM de Arduino o a la entrada analógica. Suelde la tierra de la batería a un cable que se conectará al pin de tierra del Arduino.
Su controlador de servomotor está listo para usar.
Resultado
Precaución
1. Verifique la conexión del componente
2. Desenchufe la batería después de usar
3. Desenchufe la batería si el servomotor vibra o se calienta de manera anormal.
4. Es posible alimentar uno o dos servomotores con la salida de 5V del Arduino para fines de prueba. No intente controlar una mayor cantidad de servos durante un período prolongado de tiempo. Puede dañar la placa Arduino.
5. Verifique el cableado del servomotor
Consejo
Cuando desee controlar una gran cantidad de servomotor o si está usando una batería con un voltaje más alto que el que es aceptable para los servos, es una buena práctica agregar un regulador de voltaje al controlador del servomotor.
Para aprender a programar su Arduino para controlar servomotores, consulte este tutorial.



