Créer votre banque d’image avec Python
Pour entrainer un réseau de neurone à la détection et à la reconnaissance d’objet, il faut une banque d’image sur laquelle travailler. Nous allons voir comment télécharger un grand nombre d’images à partir de Google avec Python. Pour pouvoir...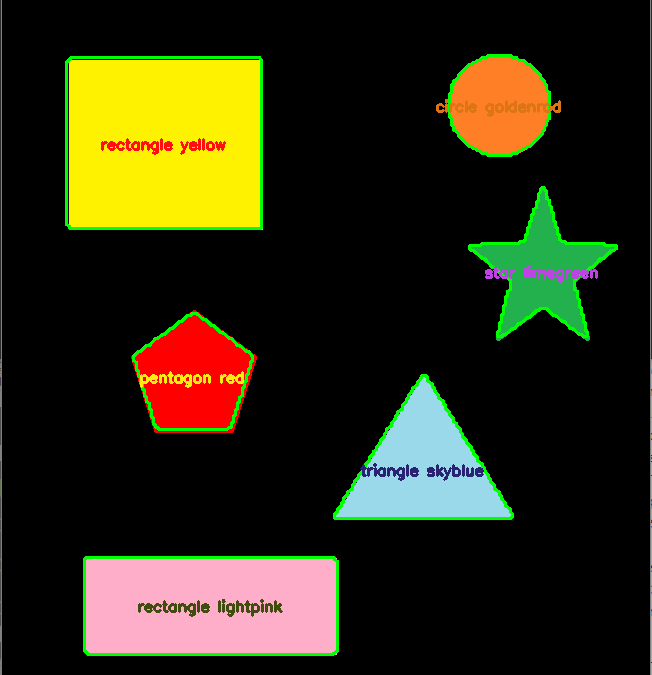
Reconnaissance de forme et de couleur avec Python
La libraire OpenCV est utilisée pour faire du traitement d’image notamment de la reconnaissance de forme et de couleur. La librairie possèdent des fonction d’acquisition et des algorithmes de traitement d’image qui permettent notamment de faire de la...
Installation d’OpenCV sur Raspberry Pi
Pour effectuer le traitement d’image nous allons procéder à l’installation d’OpenCV sur Raspberry PI. OpenCV est une bibliothèque graphique libre qui permet d’effectuer du traitement d’image relativement simplement. Avec OpenCV, il est possible de traiter...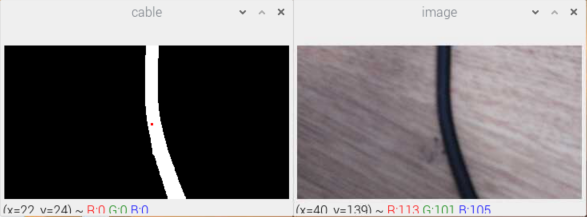
Détection d’une ligne avec Python et OpenCV
Une application intéressante en robotique est la reconnaissance de forme. Dans ce tutoriel nous allons utiliser la librairie OpenCV dans un code en Python qui permettra de détecter le centre d’une ligne. Afin de réaliser ce suivi de ligne nous allons effectuer...Produits
-
 Microcontrôleur Arduino UNO
20,83€
Microcontrôleur Arduino UNO
20,83€
-
 Kit Arduino pour débutant
82,50€
Kit Arduino pour débutant
82,50€
-
 Robot en kit WillySR pour Servomoteur FS90R
100,00€
Robot en kit WillySR pour Servomoteur FS90R
100,00€
-
 Axe servomoteur
Gratuit
Axe servomoteur
Gratuit
-
 AC BreakoutShield ESP32
13,33€
AC BreakoutShield ESP32
13,33€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license