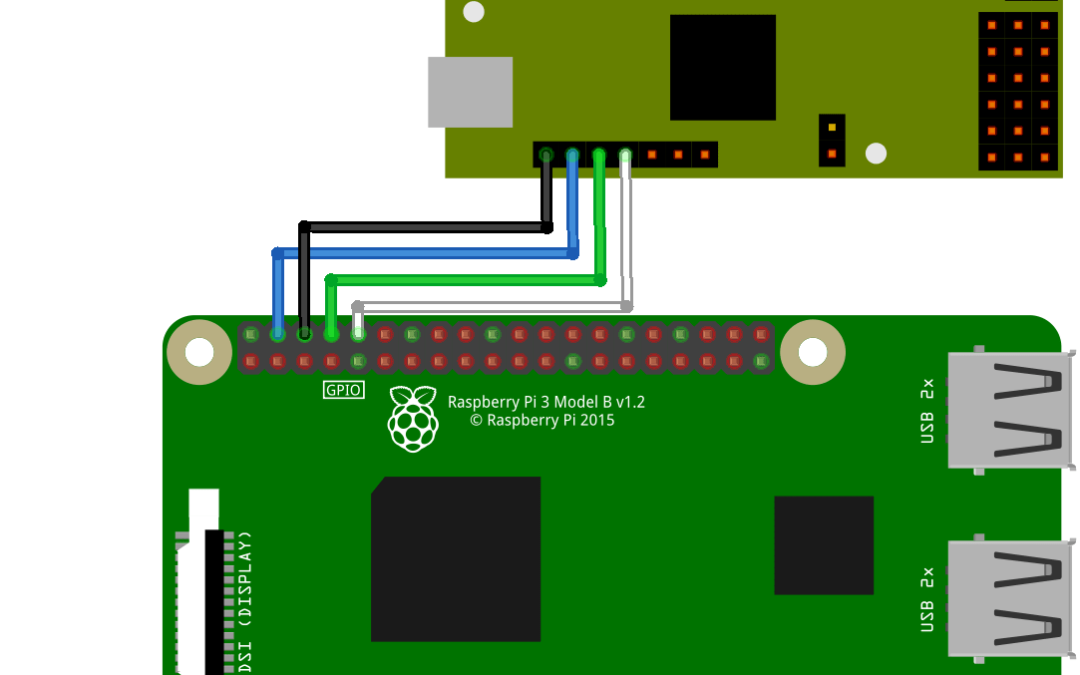
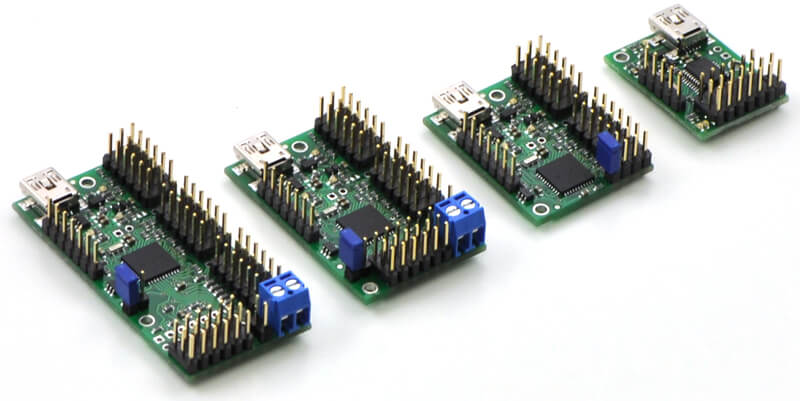
Comando un controlador serie Maestro con Arduino
Cuando se trata con varios servomotores y se necesita un número adicional de salidas para operar su robot (para controlar Hexana, por ejemplo), una solución práctica es usar un controlador en serie como el Mini Maestro de Pololu. Requisito previo: Programming with...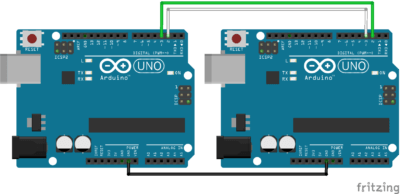
Comunicarse con Arduino
La forma más fácil de comunicarse con Arduino es usar el puerto serie. También es la herramienta más poderosa para probar y depurar su código. Material OrdenadorArduino UNO x2Jumper cable M/M x3 Comunicación con el monitor serie Las funciones de la biblioteca en serie...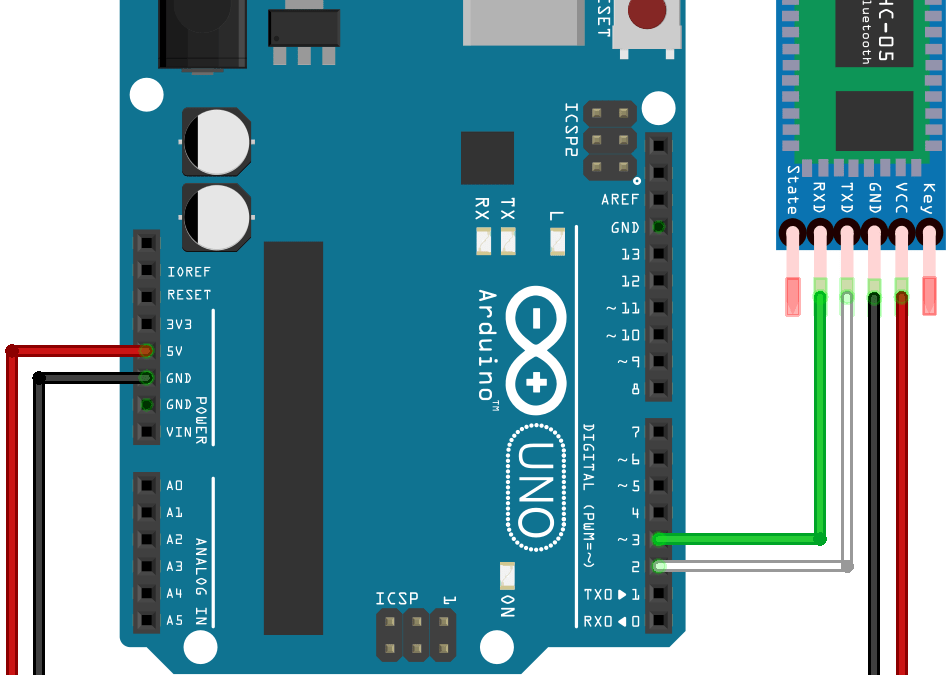
Tu Arduino se comunica con el módulo HC-05
Tu tarjeta electronica Arduino puede comunicarse con otros dispositivos (smartphone, computadora u otros microcontroladores) a través de Bluetooth usando un módulo HC-05 (Maestro / Esclavo). Esto permite conectar la tarjeta Arduino a otro sistema para enviar y recibir...
Crear una aplicación con App Inventor 2
Aprende cómo crear una aplicación para Android de manera muy simple usando App Inventor 2. En los campos de la robótica y los objetos conectados, una de las características más interesantes de implementar es el control remoto de un proyecto electrónico. Ya sea para...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license