En este tutorial veremos cómo realizar reconocimiento de objetos con TensorFlow y OpenCV usando una red neuronal pre-entrenada usando deep learning.
En un tutorial anterior vimos cómo reconocer formas simples mediante visión por ordenador. Este método sólo funciona para ciertas formas simples predefinidas. Si quieres reconocer una mayor variedad de objetos, la forma más sencilla es utilizar la inteligencia artificial.
Hardware
- Un ordenador con una instalación de Python3
- Una cámara
Principio
La inteligencia artificial es un campo de la informática en el que el propio programa aprende a realizar determinadas tareas. En particular, el reconocimiento visual. En este tutorial, vamos a utilizar una red neuronal entrenada para reconocer determinadas formas.
Se necesitan muchos datos para poder entrenar correctamente una red neuronal. Se ha demostrado que el aprendizaje es más rápido en una red neuronal entrenada para otra cosa. Por ejemplo, una red neuronal entrenada para reconocer perros se entrenará más fácilmente para reconocer gatos.
Configuración de Python
Si no, puedes descargar e instalar Python 3
A continuación, puede instalar las bibliotecas OpenCV, numpy e imutils necesarias.
python3 -m pip install opencv-python numpy imutils
Éstas son las versiones que utilizo en este tutorial
numpy== 1.22.0 tensorflow== 2.13.0 opencv== 4.6.0
N.B.: Al utilizar ciertos paquetes python, como TensorFlow, pueden surgir con mucha frecuencia problemas de compatibilidad. Si tienes dificultades, no dudes en instalar versiones específicas de los paquetes. Si tienes varios proyectos en curso, te recomiendo encarecidamente que crees entornos virtuales (venv).
Recuperar un modelo preentrenado
Descarga del modelo ModelNet-SSD del Model Zoo (por ejemplo, MobileNet SSD v2 320×320)
Descarga el fichero mscoco_label_map.pbtxt, que contiene los identificadores de los objetos reconocidos por el modelo.
N.B.: en un tutorial anterior, utilizamos los resultados del framework Caffe para el modelo (archivos prototxt y caffemodel). En este artículo, utilizamos SavedModel de TensorFlow.
Crea una carpeta TensorFlowCV, que será tu espacio de trabajo. En esta carpeta, crea una carpeta pretrained_models en la que podrás descomprimir el modelo descargado.
También puedes crear una carpeta de datos en la que colocar tus imágenes o vídeos.
Coloca los archivos del modelo en una carpeta y crea el archivo ObjectRecognition.py
Script en Python para el reconocimiento de objetos
En primer lugar, creamos un flujo de vídeo (vs) utilizando la biblioteca imutils, que recuperará las imágenes de la cámara.
vs = VideoStream(src=0, resolution=(1600, 1200)).start()
Inicializamos una red neuronal con los parámetros de SSD-ModelNetV2 (net) utilizando la biblioteca TensorFlow.
model= tf.saved_model.load("./pretrained_models/ssd_mobilenet_v2_320x320_coco17_tpu-8/saved_model")
Una función recupera del fichero pbtxt los nombres de las clases reconocidas por el modelo
#load class names
def read_label_map(label_map_path):
item_id = None
item_name = None
items = {}
with open(label_map_path, "r") as file:
for line in file:
line.replace(" ", "")
if line == "item{":
pass
elif line == "}":
pass
elif "id" in line:
item_id = int(line.split(":", 1)[1].strip())
elif "display_name" in line: #elif "name" in line:
item_name = line.split(":", 1)[1].replace("'", "").strip()
if item_id is not None and item_name is not None:
#items[item_name] = item_id
items[item_id] = item_name
item_id = None
item_name = None
return items
class_names=read_label_map("./pretrained_models/ssd_mobilenet_v2_320x320_coco17_tpu-8/mscoco_label_map.pbtxt")
class_colors = np.random.uniform(0, 255, size=(len(class_names), 3))
A continuación, crearemos un bucle que, en cada iteración, leerá la imagen de la cámara y la pasará a la entrada de la red neuronal para la detección y el reconocimiento de objetos.
#Main loop
while True:
# Get video sttream. max width 800 pixels
#img = vs.read()
img= cv2.imread('./data/two-boats.jpg') #from image file
#ret, img=vc.read() #from video or ip cam
img = imutils.resize(img, width=800)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# get height and width of image
h, w, _ = img.shape
input_tensor = np.expand_dims(img, 0)
# predict from model
resp = model(input_tensor)
Por último, el código muestra el cuadro de detección en la imagen, la probabilidad de reconocimiento y la posición.
# write classname for bounding box
cls=int(cls) #convert tensor to index
label = "{}: {:.2f}%".format(class_names[cls],score * 100)
cv2.putText(img, label, (xmin, ymin-10), cv2.FONT_HERSHEY_SIMPLEX, 1, class_colors[cls], 1)
#display position
X= (xmax+xmin)/2
Y= (ymax+ymin)/2
poslbl= "X: ({},{})".format(X,Y)
cv2.circle(img, (int(X)-15, int(Y)), 1, class_colors[cls], 2)
cv2.putText(img, poslbl, (int(X), int(Y)),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, class_colors[cls], 2)
# draw on image
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), class_colors[cls], 4)
Código completo de reconocimiento de objetos con OpenCV y TensorFlow
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# ObjectRecognitionTFVideo.py
# Description:
# Use ModelNetV2-SSD model to detect objects on image or video
#
# www.aranacorp.com
# import packages
import sys
from imutils.video import VideoStream
from imutils.video import FPS
import numpy as np
import argparse
import imutils
import time
import cv2
import tensorflow as tf
# load model from path
model= tf.saved_model.load("./pretrained_models/ssd_mobilenet_v2_320x320_coco17_tpu-8/saved_model")
print("model loaded")
#load class names
def read_label_map(label_map_path):
item_id = None
item_name = None
items = {}
with open(label_map_path, "r") as file:
for line in file:
line.replace(" ", "")
if line == "item{":
pass
elif line == "}":
pass
elif "id" in line:
item_id = int(line.split(":", 1)[1].strip())
elif "display_name" in line: #elif "name" in line:
item_name = line.split(":", 1)[1].replace("'", "").strip()
if item_id is not None and item_name is not None:
#items[item_name] = item_id
items[item_id] = item_name
item_id = None
item_name = None
return items
class_names=read_label_map("./pretrained_models/ssd_mobilenet_v2_320x320_coco17_tpu-8/mscoco_label_map.pbtxt")
class_colors = np.random.uniform(0, 255, size=(len(class_names), 3))
if __name__ == '__main__':
# Camera initialisation
print("Start Camera...")
vs = VideoStream(src=0, resolution=(1600, 1200)).start() #from usb cam
#vs = VideoStream(usePiCamera=True, resolution=(1600, 1200)).start() #from RPi cam
#vc = cv2.VideoCapture('./data/Splash - 23011.mp4') #from video file
time.sleep(2.0)
fps = FPS().start()
#Main loop
while True:
#get image
img = vs.read() # Get video stream
#img= cv2.imread('./data/two-boats.jpg') #from image file
#ret, img=vc.read() #from video or ip cam
#process image
img = imutils.resize(img, width=800) #max width 800 pixels
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# get height and width of image
h, w, _ = img.shape
input_tensor = np.expand_dims(img, 0)
# predict from model
resp = model(input_tensor)
# iterate over boxes, class_index and score list
for boxes, classes, scores in zip(resp['detection_boxes'].numpy(), resp['detection_classes'], resp['detection_scores'].numpy()):
for box, cls, score in zip(boxes, classes, scores): # iterate over sub values in list
if score > 0.61: # we are using only detection with confidence of over 0.6
ymin = int(box[0] * h)
xmin = int(box[1] * w)
ymax = int(box[2] * h)
xmax = int(box[3] * w)
# write classname for bounding box
cls=int(cls) #convert tensor to index
label = "{}: {:.2f}%".format(class_names[cls],score * 100)
cv2.putText(img, label, (xmin, ymin-10), cv2.FONT_HERSHEY_SIMPLEX, 1, class_colors[cls], 1)
#display position
X= (xmax+xmin)/2
Y= (ymax+ymin)/2
poslbl= "X: ({},{})".format(X,Y)
cv2.circle(img, (int(X)-15, int(Y)), 1, class_colors[cls], 2)
cv2.putText(img, poslbl, (int(X), int(Y)),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, class_colors[cls], 2)
# draw on image
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), class_colors[cls], 4)
# Show video frame
cv2.imshow("Frame", img)
key = cv2.waitKey(1) & 0xFF
# Exit script with letter q
if key == ord("q"):
break
# FPS update
fps.update()
# Stops fps and display info
fps.stop()
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
cv2.destroyAllWindows()
vs.stop()
#vc.release()
Fuentes de imágenes para la detección de objetos
Puede utilizar este script con diferentes fuentes de imágenes. Para ello, debe adaptar ligeramente el código anterior para modificar la variable «img» que contiene la imagen que se va a analizar.
- La cámara web de tu ordenador
vs = VideoStream(src=0, resolution=(1600, 1200)).start() while True: frame = vs.read()
El flujo de vídeo debe detenerse al final del script con vs.stop()
- Una cámara IP
vc = cv2.VideoCapture('rtsp://user:password@ipaddress:rtspPort')
while True:
ret, frame=vc.read() #from ip cam
Asegúrate de detener la captura de vídeo al final del script con vc.release()
- La Raspberry Pi Picam
vs = VideoStream(usePiCamera=True, resolution=(1600, 1200)).start() while True: frame = vs.read()
Recuerda detener el flujo al final del script con vs.stop()
- Un archivo de vídeo
vc = cv2.VideoCapture('./img/Splash - 23011.mp4') #from video
while True:
ret, frame=vc.read() #from video
- Un archivo de imagen
frame= cv2.imread('./img/two-boats.jpg')
Resultados
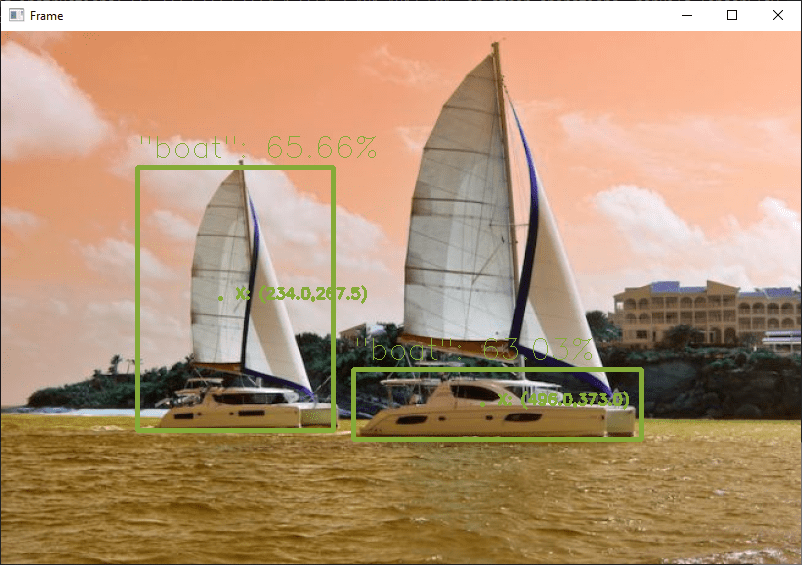
Para este ejemplo, enviamos una imagen de dos barcos como entrada a la red neuronal, que son reconocidos correctamente. Para obtener resultados ligeramente diferentes, puede modificar el parámetro de confianza para evitar falsos positivos.
Puedes probar este código con tu webcam o con fotos, por ejemplo, para ver cómo funcionan el modelo y el reconocimiento de objetos.
Una vez que tu script funcione, puedes entrenar tu modelo para detectar otros objetos.
Paquetes y modelos
En este tutorial, hemos utilizado el modelo preentrenado SSD ModelNetV2. Cabe destacar que existen otros modelos de clasificación con diferentes prestaciones y características.
- vgg16
- vgg19
- resnet50
- resnet101
- resnet152
- densenet121
- densenet169
- densenet201
- inceptionresnetv2
- inceptionv3
- mobilenet
- mobilenetv2
- nasnetlarge
- nasnetmóvil
- xcepción
No dudes en dejarnos un comentario para compartir los modelos que utilizas o conoces y tu opinión.



