The HC-SR04 is an ultrasonic sensor that measures distance with ultrasound waves. It uses the same principle as a sonar which is sending a sound wave and measuring the time between the transmission and reception of its echo.
Material
- Computer
- Arduino UNO
- USB cable to connect Arduino to the computer
- Ultrasonic distance sensor HC-SR04
Operating principle
The HC-SR04 module consists of an ultrasonic transmitter and receiver. The transmitter sends out sound waves when it receives a signal from the trigger control. These waves are reflected when they encounter an obstacle. The transmitter detects these reflected waves and sends a signal back to the Echo pin.
N.B.: Some surfaces are better at reflecting sound waves. Choose your sensor carefully according to your application.
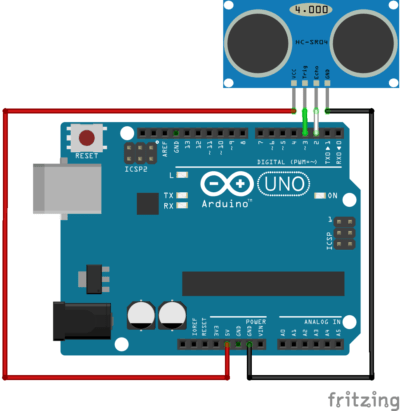
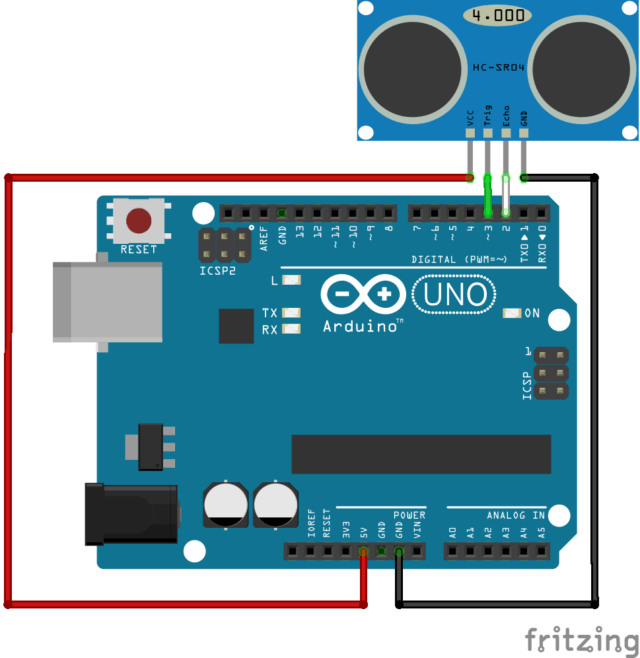
Wiring of sensor HC-SR04
Code
According to the sensor specifications, HC-SR04 has a range of 2 to 400 cm. To measure a distance, a pulse of 10µs has to be sent to the trigger pin (at least every 60ms) and the output pulse duration need to be measured from the echo pin. This duration divided by 58 should give the value in centimetres. A useful function to measure a pulse duration is the function pulseIn().
#define trigPin 3 #define echoPin 2 long distance; void setup() {
#define trigPin 3 #define echoPin 2 long distance; long duration; void setup() { Serial.begin(9600); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); } void loop() { distance=readUltrasonicSensor(); if (distance >= 400 || distance <= 0){ Serial.println("Unknown value"); } else { Serial.print(distance); Serial.println(" cm"); } delay(500);// delay in milliseconds } long readUltrasonicSensor(){ // Send 10µs pulse digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Read pulse duration duration = pulseIn(echoPin, HIGH); Serial.println(duration); //Convert and return value return duration/ 58; }
N.B. Depending on where you purchased your sensor and its version, the range and conversion value may differ a bit. Check your sensor specifications.
Library
To simplify the code, you can create or download the library SR04.h (by mrRobot62). The code can then be rewritten as follow:
#include "SR04.h" #define TRIG_PIN 3 #define ECHO_PIN 2 #define LOOPDELAY 1000 SR04 hcsr04 = SR04(ECHO_PIN,TRIG_PIN); long distance; void setup() { Serial.begin(9600); delay(LOOPDELAY); } void loop() { distance=hcsr04.Distance(); Serial.print(distance); Serial.println("cm"); delay(LOOPDELAY); }
Application
Source
Find other examples and tutorials in our Automatic code generator
Code Architect




Greetings,
Is the sensor waterproof?
Can the sensor be mounted outside the garage and and still precisely read distance after the rain?
Will the water drops around/on the sensor affect the readings?
The sensor is not waterproof. You will have to design a housing to resist the rain.
You can also find a waterproof distance sensor
Will the housing not affect the Tx&Rx signal?
Will the glass housing not affect the Tx&Rx signal?
Depending on the housing, yes, it might affect. You should look into waterproof sensor.