Summary on the instruction for in C
The for instruction allows code blocks to be repeated. It is the first step towards more efficient and readable code. Syntax of the instruction for The for instruction takes, as input, a counter whose increment and end condition is defined. It is often used in...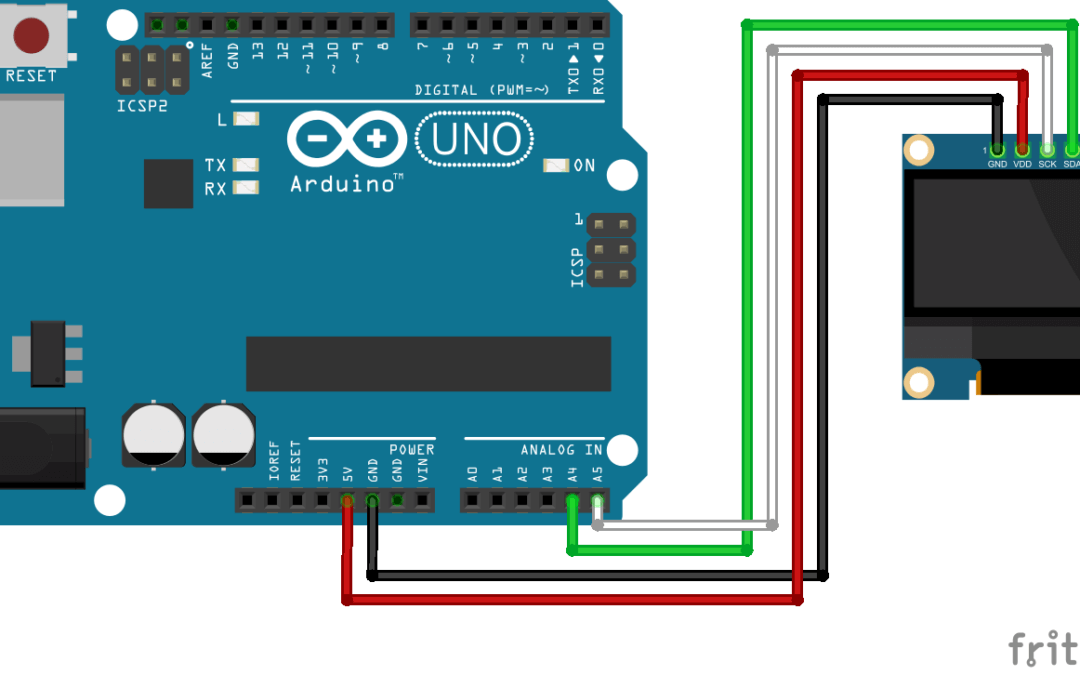
Using an OLED Display with Arduino
The OLED display is a compact graphic display with a resolution of 128 x 64 pixels that allows you to draw and display text to create a graphical interface. Hardware ComputerArduino UNOUSB A Male to B Male CableOLED TF052 Principle of operation The OLED display TF052...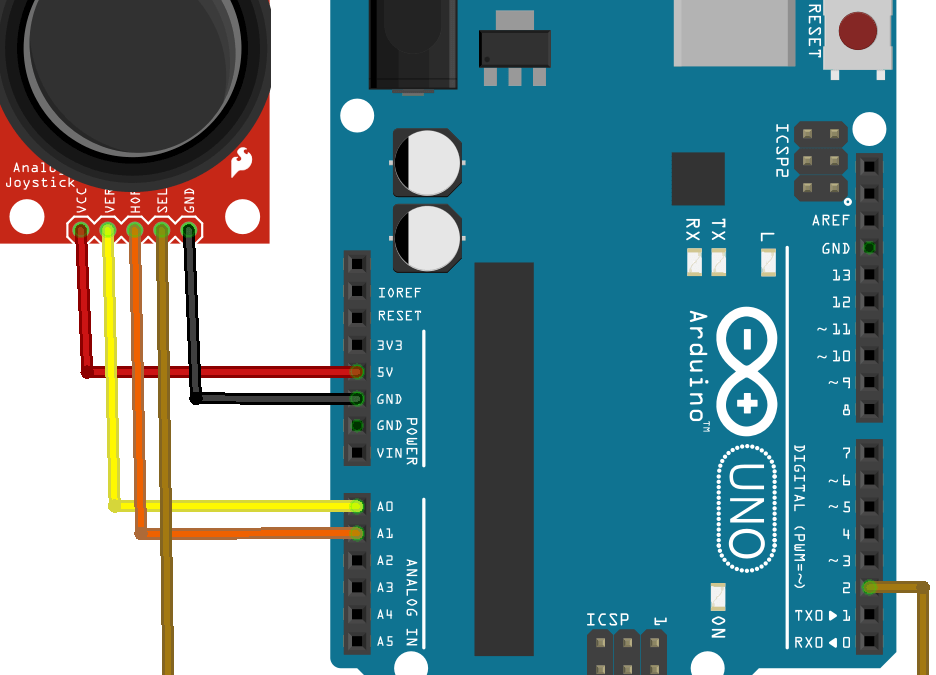
Using a Joystick with Arduino
The joystick is a position sensor which returns two analogue values representing its X,Y position. It can be used as an interface to navigate a menu or to control an object in direction or speed. It is commonly found on joysticks for video games, model making remote...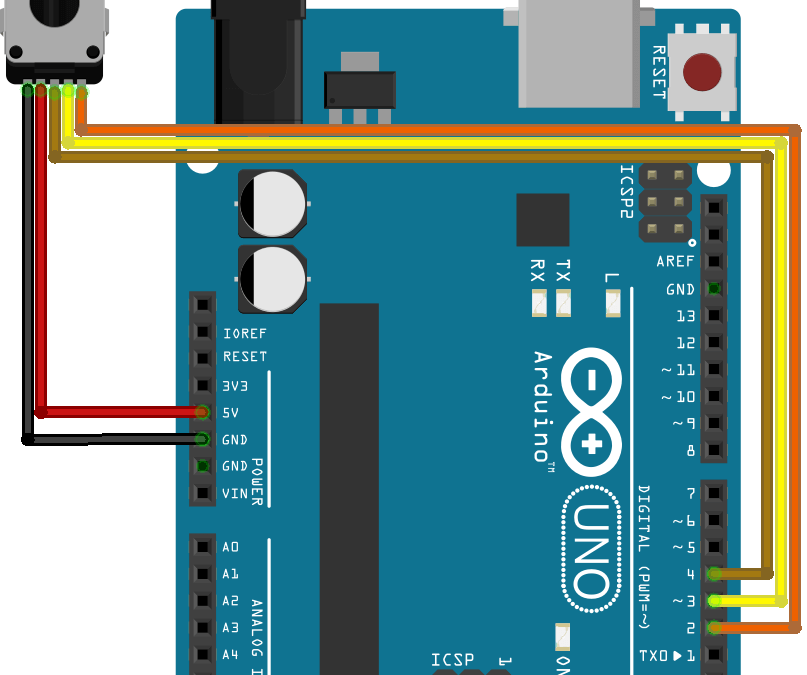
Using a Rotary Encoder with Arduino
The rotary encoder is a rotation sensor whose direction and angle can be known. Similar in appearance to the potentiometer, the encoder has no limit stroke and instead of returning a resistance value, like the potentiometer, the encoder returns two digital signals...Products
-
 Robotic kit Quadrina Servo MG90S
208.33€
Robotic kit Quadrina Servo MG90S
208.33€
-
 STL file QuadrinaV1
1.50€
STL file QuadrinaV1
1.50€
-
 Robotic kit Rovy for DC Motor TTGM
137.50€
Robotic kit Rovy for DC Motor TTGM
137.50€
-
 Robotic kit WillySR Servo FS90R
100.00€
Robotic kit WillySR Servo FS90R
100.00€
License
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license