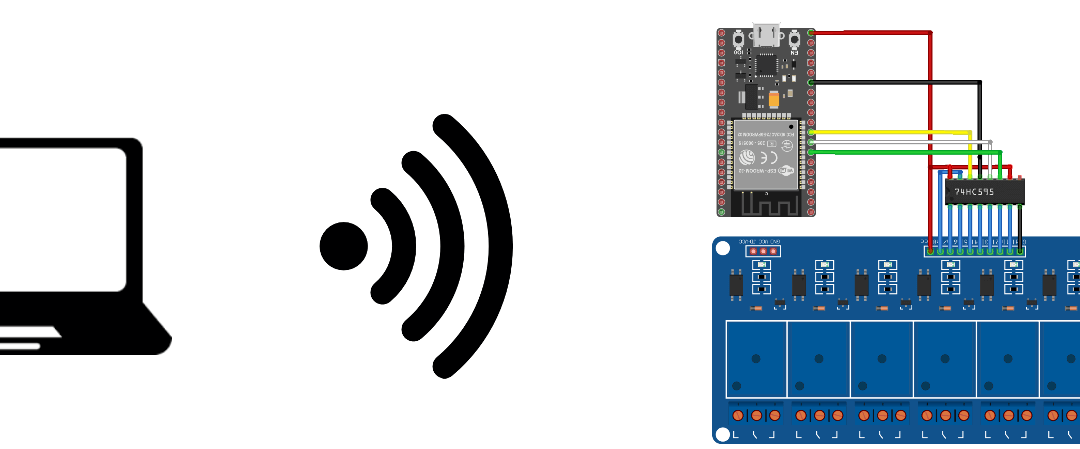
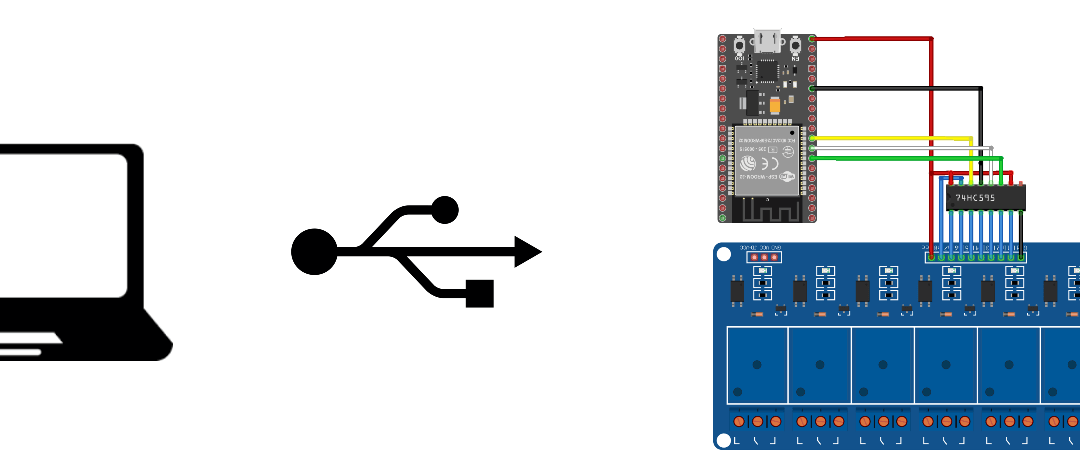
Control 8 relays using ESP32 and serial monitor
In this tutorial we will see how to address each relay individually with a NodeMCU32S microcontroller and 74HC595 shift registers. At the end of this tutorial you will also be able to control each relay using the serial monitor. This tutorial follows on from the...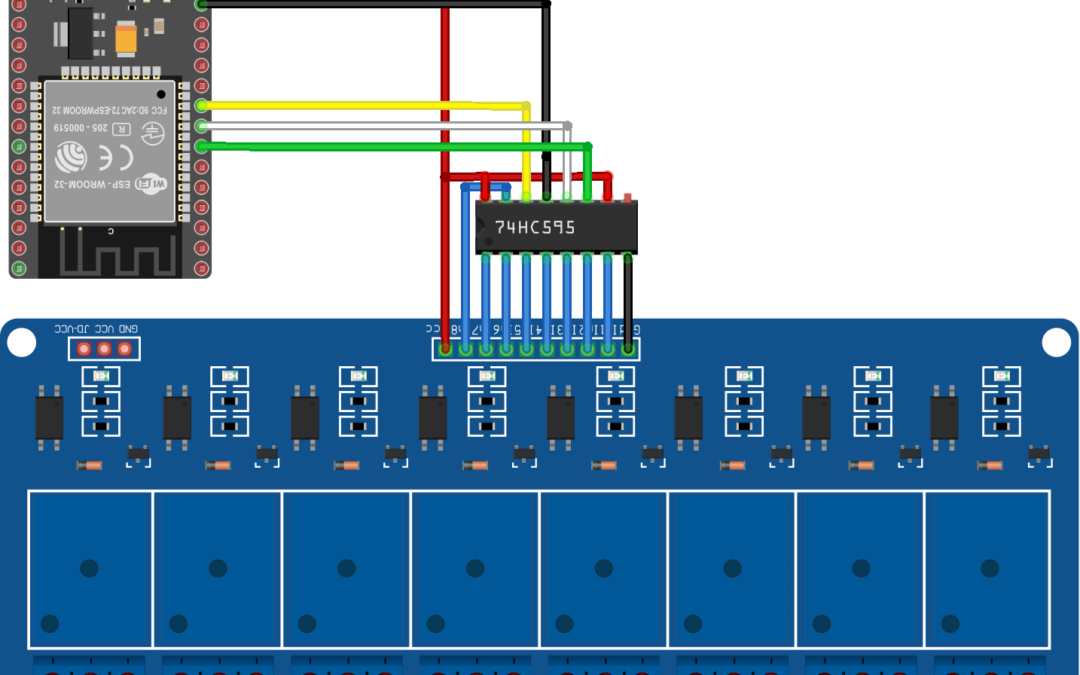
Controlling 8 relays with ESP32 and shift register
In this series of tutorials, we will see how to drive a multitude of relays with a NodeMCU32S microcontroller and 74HC595 shift registers. We will then see how to address each relay individually. Finally, we will create a web interface to control each relay via the...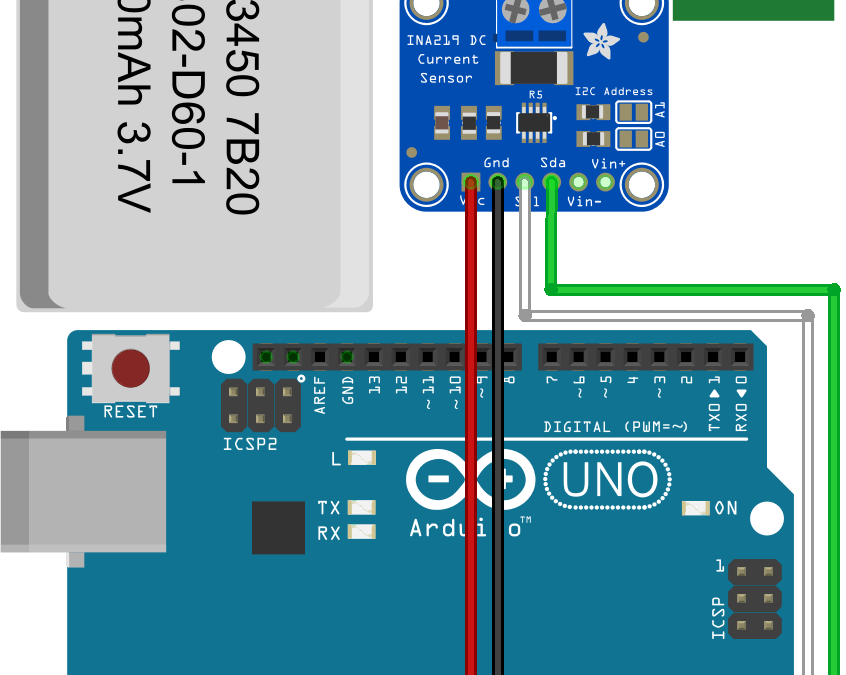
Power measurement with Arduino and INA219
The INA219 Sensor is a current and voltage sensor for easy measurement of power. In some applications, it is interesting to measure the electrical power exchanged between devices. For example, measuring the power recovered by a solar panel. We will see in this...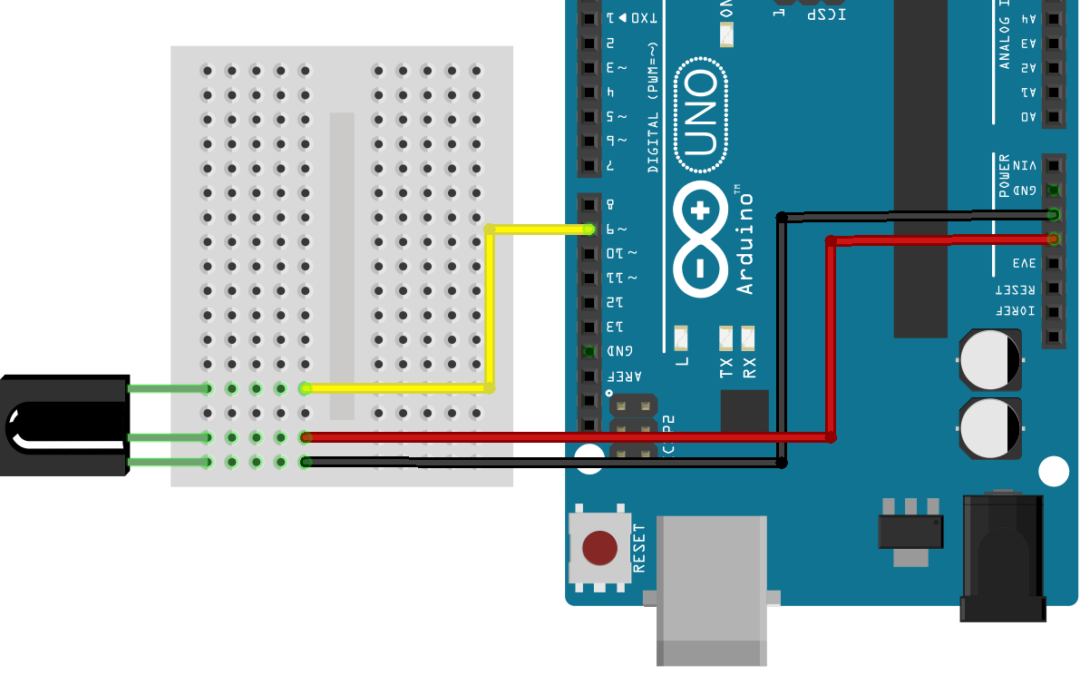
Control your project using an IR remote
There are different ways to communicate with a system. One of the most used, especially with television, is the infrared remote control. We will see how to drive an Arduino using a receiver and an IR remote control. In this tutorial, we use an IR remote control...Products
-
 Robotic kit Quadrina Servo MG90S
208.33€
Robotic kit Quadrina Servo MG90S
208.33€
-
 STL file QuadrinaV1
1.50€
STL file QuadrinaV1
1.50€
-
 Robotic kit Rovy for DC Motor TTGM
137.50€
Robotic kit Rovy for DC Motor TTGM
137.50€
-
 Robotic kit WillySR Servo FS90R
100.00€
Robotic kit WillySR Servo FS90R
100.00€
License
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license